バルサ電動機
![]()
◆パイロン機サウスポー
(飛行編)
| 初飛行 穏やかな天候の中での初飛行になった。舵角の方向を確認、M口さんに手投げをお願いした。手を離れた機体は直ぐに上空へ。ダウントリム3コマ入れて落ち着いた。エルロン方向はノートリム。 飛行特性は変な癖がなく真っすぐに飛んでくれる。旋回時に巻き込むことはなく、速度を落として旋回しても失速に入る気配はない。翼面荷重32gの効果。 高速時には舵が敏感になるのでD/Rを切り換え。しかし、速度が遅くなると途端にエルロン方向の舵が効きにくくなる。D/Rの切り換えは適宜行うことが必要。 肝心の速度は、比較対象がなく機速を直接測定することもできないので何とも言えないが、普通の機体よりはかなり早い。フルスロットルでのパイロンターンは気持ちよい。旋回時に高度が落ちないので安心してターンできる。 そして着陸へ。低速時でも舵が利くので着陸コースに入れるのは容易。丁寧に高度処理して芝生の上に着陸。無傷で帰還でした。 今回は少し緊張したが、素直な機体で操縦が簡単。ピッチング方向の安定性が高いで滑らかに飛んでくれた。大成功! 2回目は自分で手投げ、途中で操縦を変わってもらって写真撮影。小さな機体なのでピントが合い難いが飛んだ証拠にはなる。黄色は映えます。 着陸は少し速度がある状態で行った。接地寸前で伸びるのはパイロン機、ピアノ線の主脚も上手く機能して無事に着陸。 リポ電池は写真撮影で5分以上飛ばして残量40%。容量不足の心配なし。 何はともあれ良く飛ぶ機体。
|
||||||||||||||||||||||||
| ドレスアップ 電池の位置を記憶。重心位置は25%よりは少し後方、舵角、ペラ選択と合わせて今後調整していく。 良く飛んだので早速ドレスアップ。手持ちのシールを貼り付け。翼端のチェック柄は視認性が良さそう。(2020年2月11日)
|
||||||||||||||||||||||||
| 爽快 初飛行は5.5×4.5を使用。スロットルハイで騒々しい音が発生、ペラのバランスが悪かったようだ。本日は手持ちのペラで最もピッチの大きな6×5.5を試してみた。 手を離れた機体は一瞬高度を下げたがその後に急加速して上空へ。早い!居合わせた皆さんからも早い・・の声。曇天ながら黄色の機体が功を奏して見失うことなく左右を何度も往復。途中、M口さんにも操縦してもらった。昔パイロンの経験があるので見事なパイロンターンを披露。 速度が上がるとエレベータの操作がシビアになる。リンケージのガタが問題になるレベル。エレベータサーボはTREXヘリのラダー用を使用。ダイレクトリンケージとデジタルサーボのお陰で破綻することなく操縦できていると思う。 モータは2千円程度、耐久性は未知数だが、この値段でこのスピードが得られるとは驚いた。スペアを準備しておくことにした。 翼端のチェッカー柄は視認性アップに貢献、これも正解。 いや〜爽快な飛びっぷりの機体になりました。(2020年2月15日)
|
||||||||||||||||||||||||
| ペラの選択 手持ちのペラでデータ取り。ペラは5種類 電圧:リポ3セル
ピッチと回転数からするとAPC6×5.5の選択は妥当と言える。APC5×5 の回転数も興味あるので次回試してみる。モータの余裕があるのでさらにピッチの大きなペラを探してみることにする。(2020年2月16日) |
||||||||||||||||||||||||
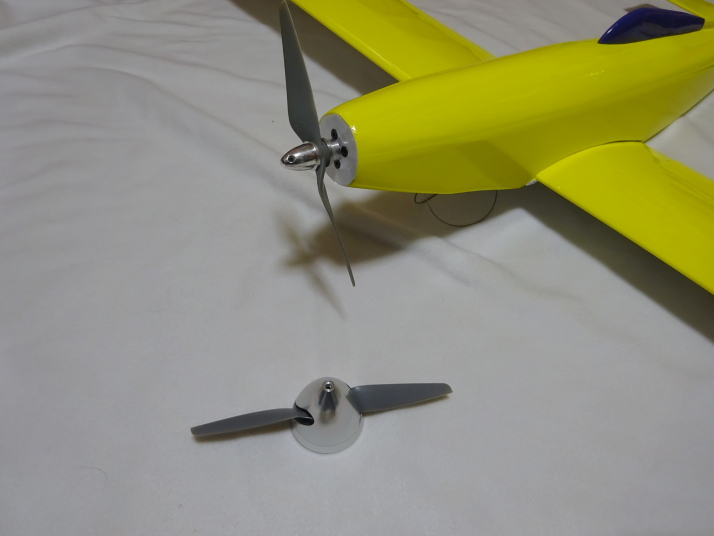
| モータ交換 Kv値1800からKv値3000のモータに交換。2つのモータは寸法、重量がほぼ同じ。交換は簡単に完了。 このモータの軸は4mm、これに合うアルミスピンナーを入手。芯ブレなし。ペラは定番のAPC4.75×4.75。 飛行場で電流、回転数をチェック。電流:26A、回転数:23500となった。フルスロットルで異音なし。 M口さんに手投げをお願いした。手を離れた機体は一瞬沈み込んで・・・その後、急上昇。速度が出ると普通に操縦できる。速度は明らかに前よりも速い!フルスロットルでパイロンターン、気持ちよく回る。 目で機体を追うことができるレベルなので操縦ミスはないが、3分も飛ばすと疲れてくる。4分強飛ばして着陸。 フルスロットルは半分の時間程度、モータは指で触れる程度なので50度未満、電池の発熱は少なかったが、残量25%位で電流消費が大きく注意が必要。タイマーを3分30秒に設定。モータは高回転にすると急に効率が悪くなるようだ。 2度目に飛行も発進時に一瞬沈み込む。小径ペラなので仕方ないのだろう。この点に気を付けさえすればOK。 ますます爽快な飛行機となった。(2020年5月17日)
|
(製作編)
|
経緯
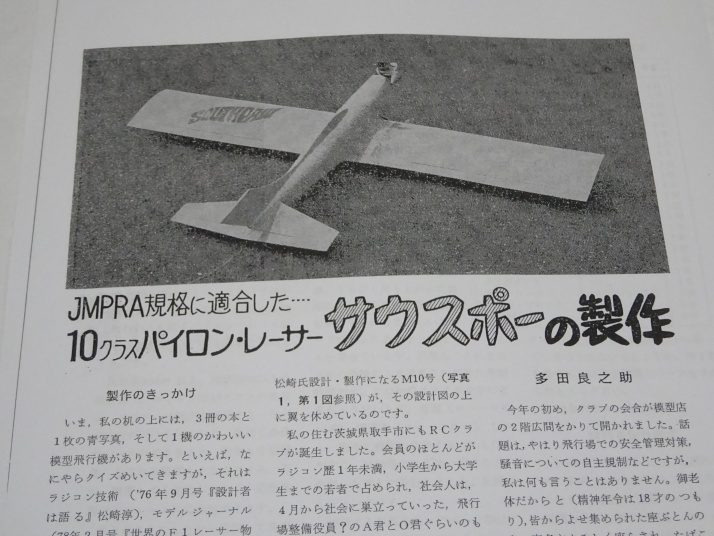
1978年頃のラジコン技術には10クラスのパイロン機の製作記事がいくつかある。サウスポー、シンシア、風小僧である。またこの時期には各地で流行していたようで、ミスターX、センスター、ラビットなど10機近くの機体が紹介されている。レギュレーションは単純で、エンジン10、翼面積18dm2以上、翼厚20mm以上となっていたようだ。 以前、マルタカの1/2Aのムスタングをパイロン機として製作したが速度が出ずにがっかり、そのリベンジの意味でサウスポーを製作することにした。 電動化にあたってKV値の高いモータが必要。Turnigy製で400クラス、KV値1800のモータを入手。ペラはAPC6×5.5Eを使用予定。バッテリは3セル1500mAh、飛行時間は3分程度とすると十分な容量と思われる。 翼型は8.5%厚半対称、主翼は矩形翼なので製作は容易。 当時の全備重量は800g程度、今回は電動化と軽量メカでムスタング並みの600g程度で完成する予定。(2020年1月9日)
|
|||||
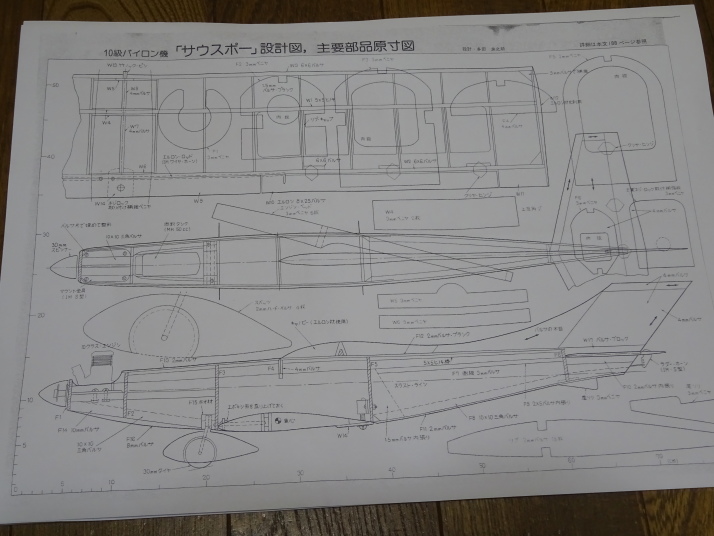
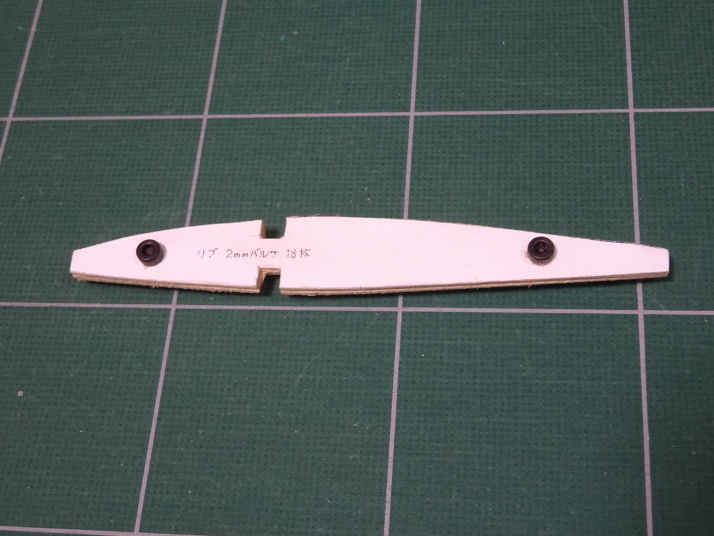
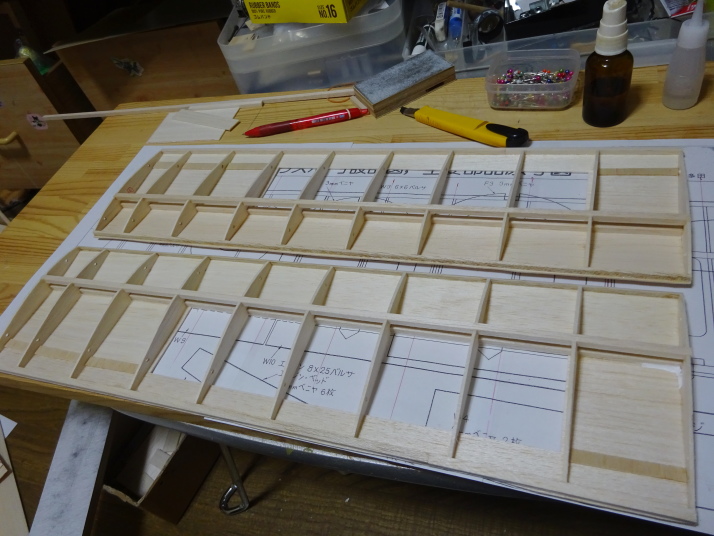
| 主翼製作 図面を拡大して原寸図とし、各部材を切り出してキットの状態として作業開始。モータはフロントマウントにして他のモータへの交換を容易にした。 主翼リブはベニヤテンプレートに挟んで整形。矩形翼なので簡単にできる。スパーは5×5mmのバルサ角材。図面ではヒノキとなっているが経験的にバルサ角材で問題なし。 前縁はマルタカの機体によく使われている補助前縁材を使用する形式とした。前縁を真っすぐに作るのが容易になる、 下面のプランクまで終了。(2020年1月13日)
|
|||||
| 主翼完成 上面をプランクする際にアルミ材で挟んでタイトボンドで接着。一晩放置すれば真っすぐな前縁、後縁となる。 主翼の上反角は2度、カンザシで左右連結してエポキシ接着剤が固まるまで重しをかけて放置。エルロンは1サーボとするのでエルロンホーンを埋め込んだ。 エルロン材を整形して主翼完成。重量は112gとなった。
|
|||||
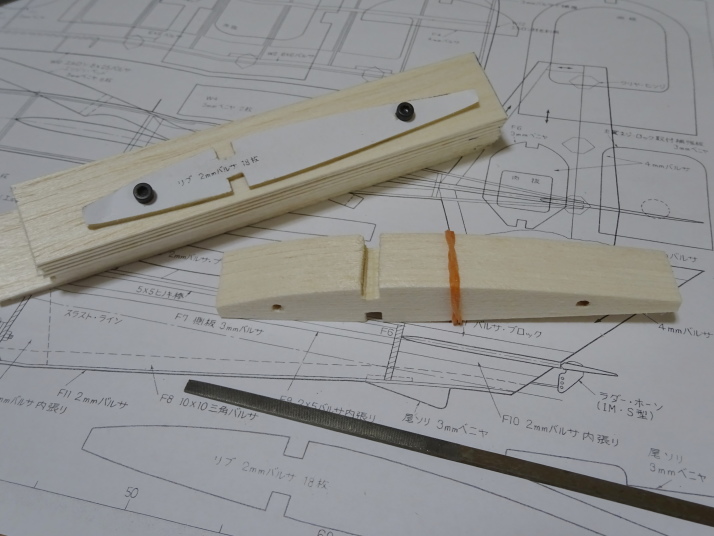
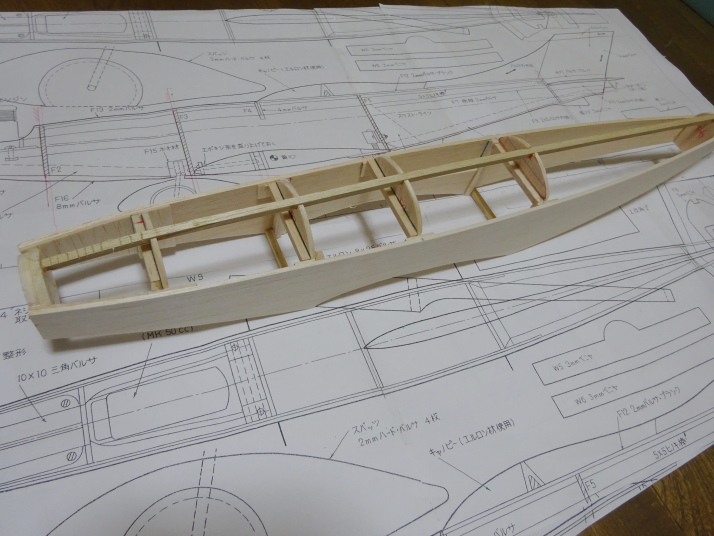
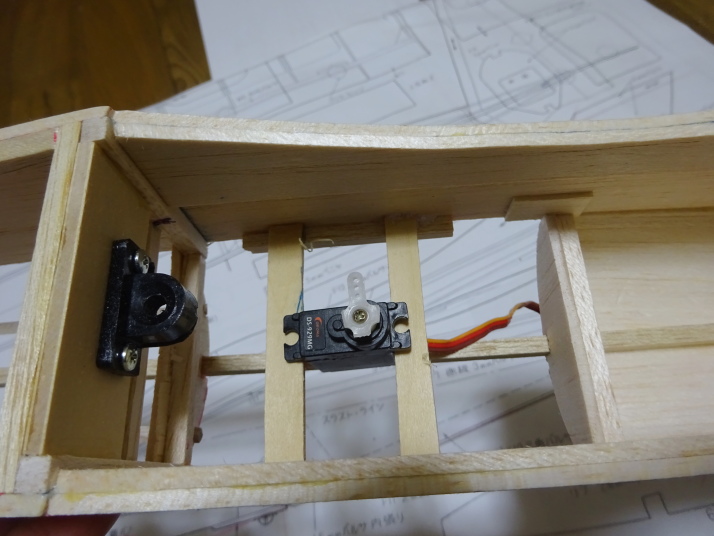
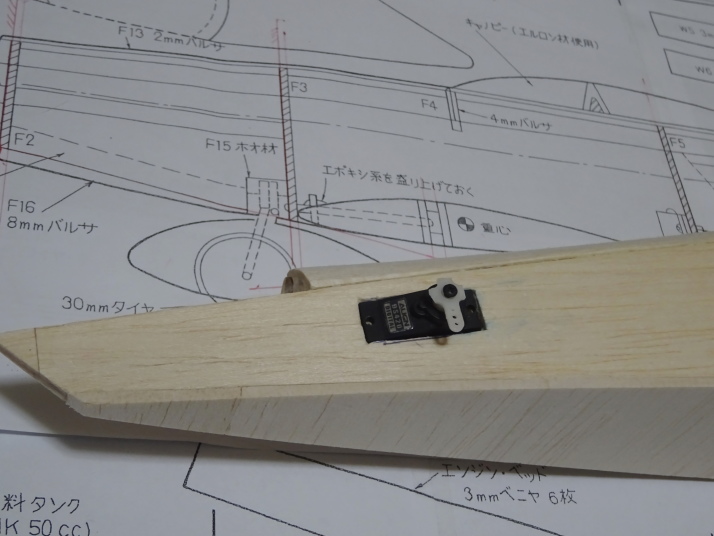
| 胴体製作 側板は3mmバルサ、基本的に5×5mmバルサ角材を胴枠として使用。主翼後縁の取り付け部は3mmべニアを使用して強度確保。 エレベータサーボの取り付け部はエルロンサーボ、リンケージと干渉しない箇所に設定。主翼前縁のダウエル受けは3mmべニアで製作。
|
|||||
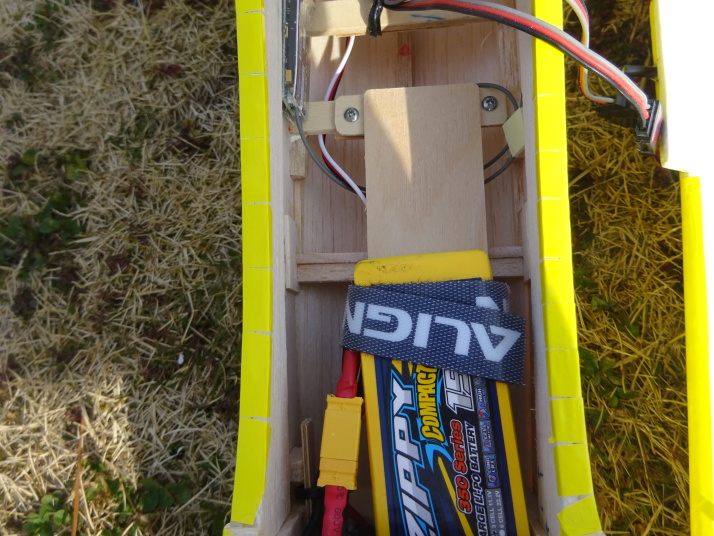
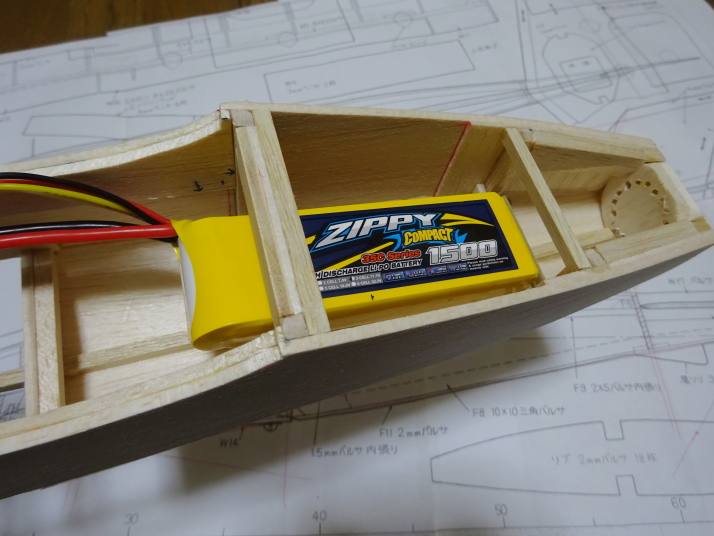
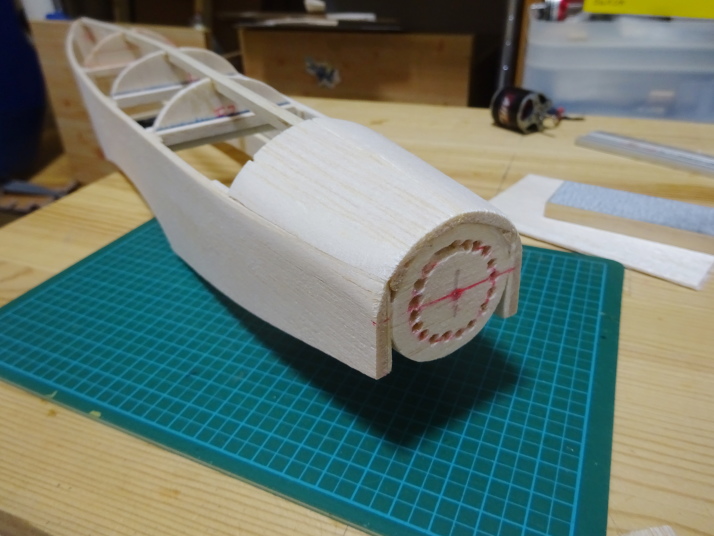
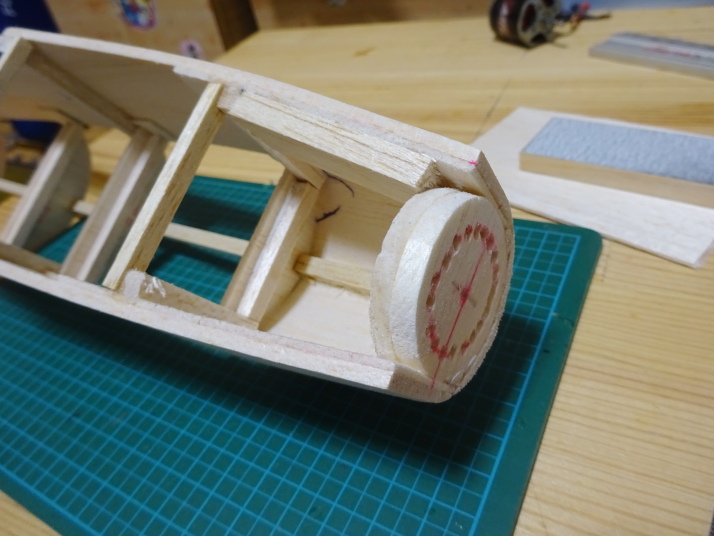
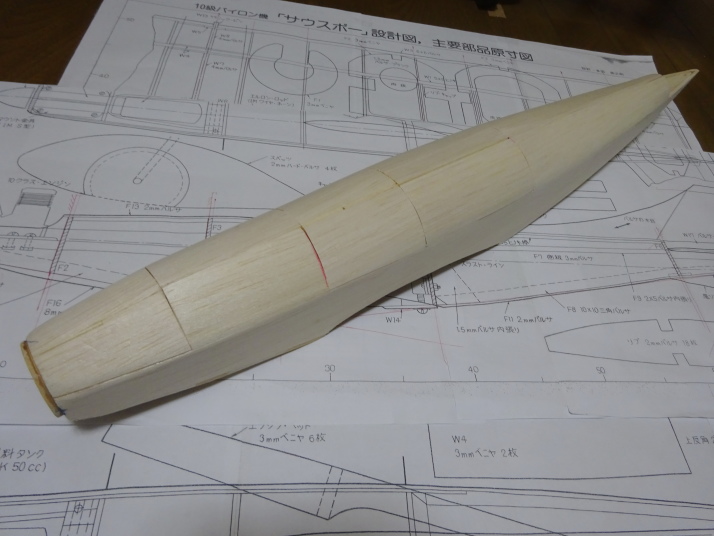
| リポ電池は燃料タンクの部位に差し込むようにした。経験的にこの位置にリポ電池を置くと重心が合う。今回はどうだろうか・・・。 これで事前に必要な工作は終わり。胴体上面をプランク。製作記事ではプランク材は2mmとなっているが、今回は3mmのソフトバルサを使用。一気にプランクするのではなく、分割して胴枠の間をプランしていく。この方法は空野氏のミグ15などで経験あり。3mmバルサを使うと後行程のサンディングが楽になる。 機首に見えるはモータマウントを接着するための部材、後でモータの大きさ分だけくり抜く。これにより機首周りの工作が楽になる。(2020年1月19日)。
|
|||||
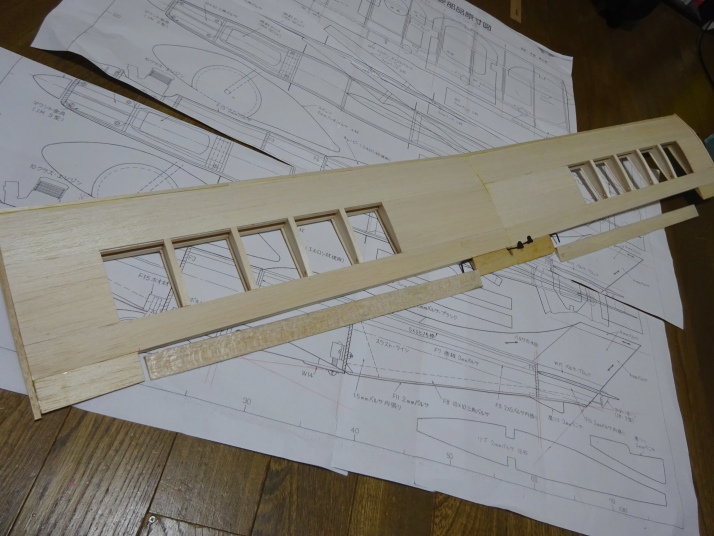
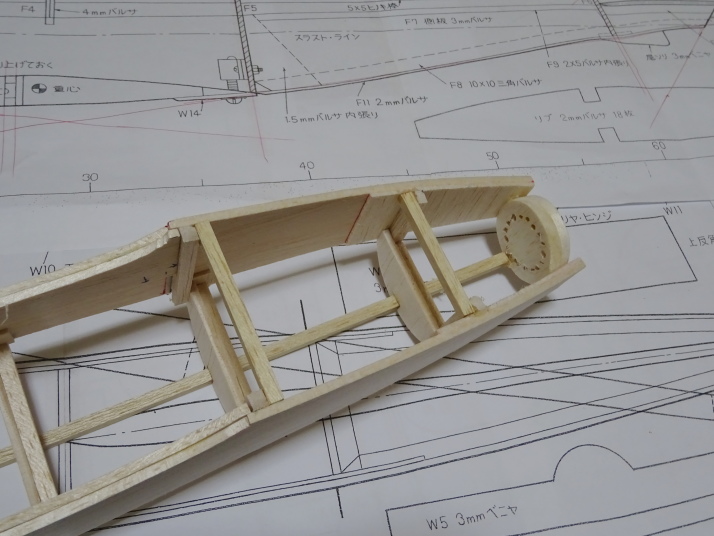
| 胴体完成 重心位置が気がかりなので実際に部品を取り付けて測定、何と極端な前重心。おまけに図面上の重心位置は主翼の40%よりも後ろ。他の同様のパイロン機の場合は30%程度なので記入ミスと思うが。 リポ電池を重心位置に持ってくれば重心は合うが、サーボとの干渉が懸念される。そこでエレベータサーボを胴体後部に直接取り付けるように変更。これで問題は解決するはず。尾翼は軽量化の必要がないのでハードバルサの使用も考えている。 10エンジンはマフラー込みで150g近くあるはず。モータは70g程度なので前重心になるはずはないと踏んでいたが・・・不思議。 以前製作したQRPのMAXの図面が出てきた。舵角の情報は参考になる。尾翼の後縁は鋭く削れとの記載あり。実践! 主脚は軽量化のために車輪式から1mmピアノ線に変更。飛行場の着陸場所は芝生なので問題なし。これで胴体完成。(2020年1月26日)
|
|||||
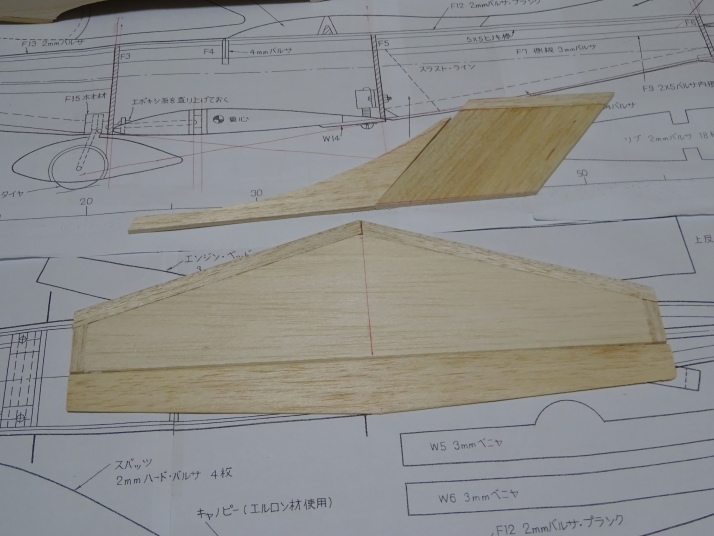
| 生地完成 尾翼を製作して生地完成。フイルム貼り前の状態で全備重量520gと軽量。重心は相変わらず前重心だが、リポ電池を重心位置に持ってくればOK。 10パイロン機の規定に800g以上というのも含まれいるので本来なら300g近くを追加する必要がある。レースする訳でもなく、当初の計画通り600gとして重心合わせのために後部にウエイト積むのが現実的。(2020年1月30日) フイルム貼り いつもの場所でサンディング。形状が単純なので1時間余りで終了。気になる箇所をパテ埋めして最後は400番のペーパーで仕上げ。 フイルムはマッドマウス用に購入した黄色とと白色の2色。自分の機体は黄色系が多いが、何より視認性が良いのが理由。尾翼とエルロン終了。(2020年2月2日)
|
|||||
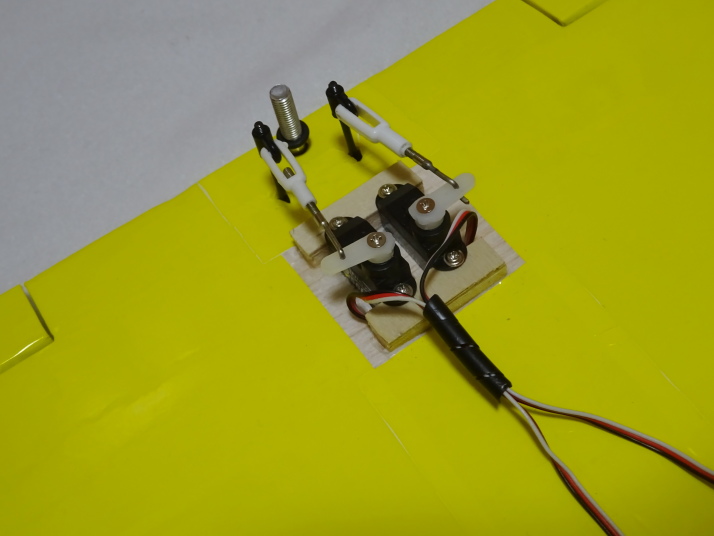
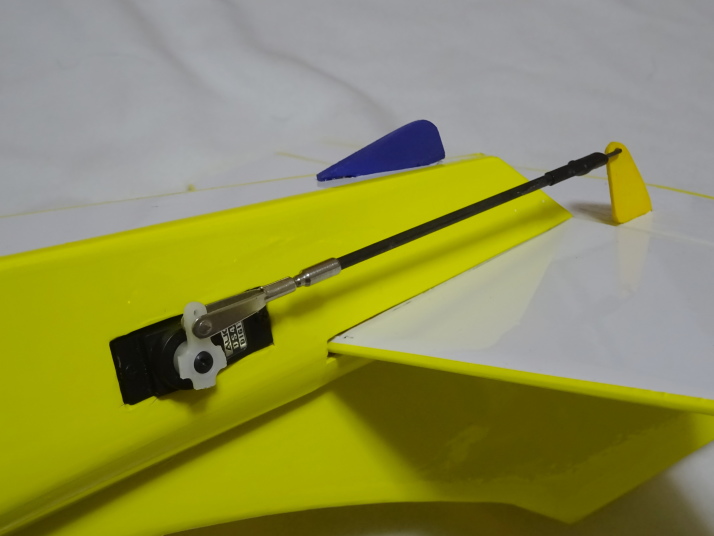
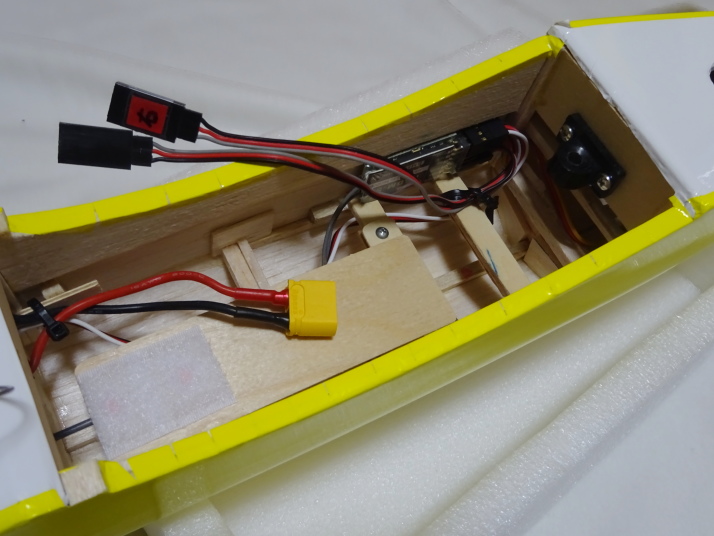
| フイルム貼り完了 表が黄色で裏が白のワンパターンのデザイン、部屋の中が黄色の飛行機だらけとなった。 メカ搭載 モータを組み込んで実際に回してみた。ペラはAPCの6×5.5、ホビキンの40mmのアルミスピンナーを使用。1万回転を超えると振動発生、取り付け方を微調整するも改善しない。安物はダメということ。仕方ないのでモータ付属のコレットを装着。こちらはフルハイでも振動なし。15000回転は超えることを確認。手元にダイヤ、ピッチの異なるペラがあるので良いものを選ぶ必要がある。 エルロンは取り付けスペースの関係で6gサーボ2個とした。デファレンシャルの設定もできるので良いと思う。空戦フラップは効果あるのかな? エレベータは9gサーボを使用。リンケージはカーボンロッドを使って剛性を確保。ホーンは長めにしてサーボのトルクを有効に利用できるようにした。 重心の関係でリポ電池は重心位置の近くに配置する必要がある。メカ室は広いが電池と他のメカとの干渉が無いようにレイアウトを工夫した。
|
|||||
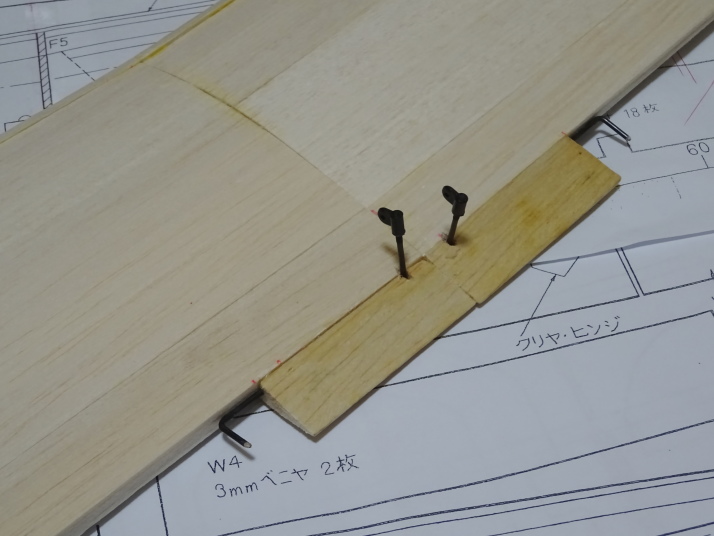
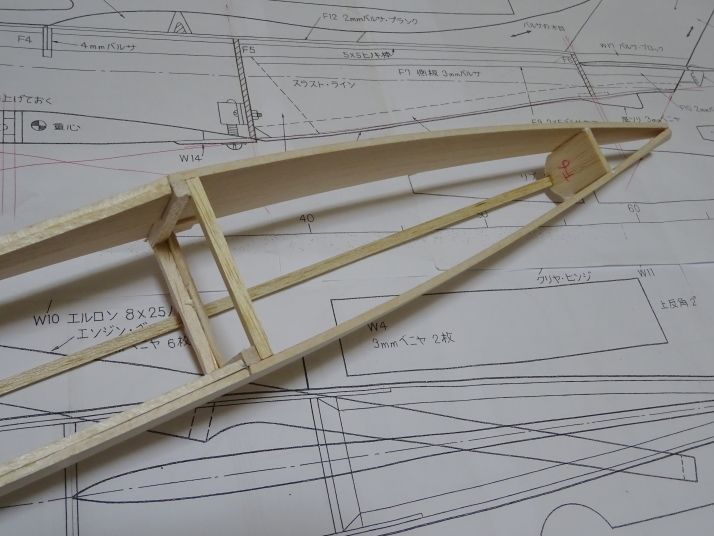
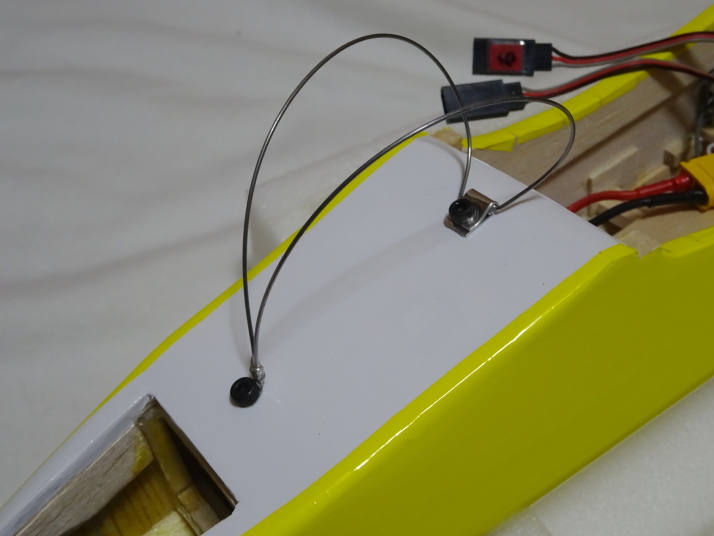
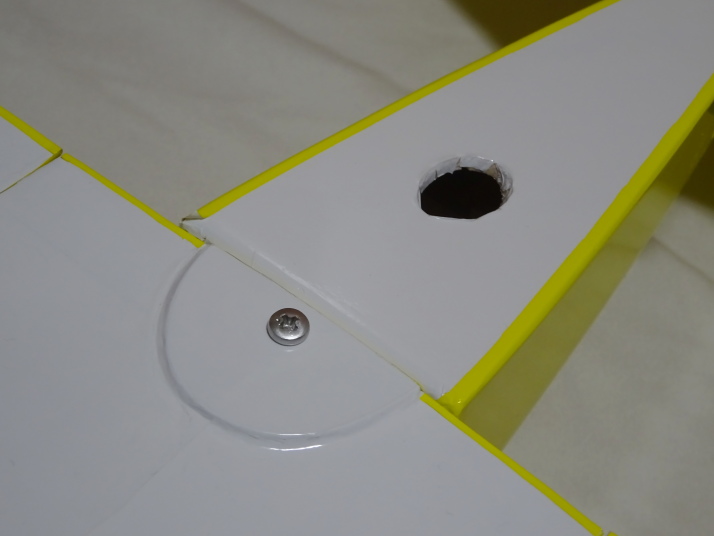
| 完成! 主脚は1mmピアノ線から作成。銅線を使ってピアノ線を半田付け、フラックスを使えば簡単にできる。固定は胴体にあらかじめ埋め込んでいた爪付きナットで行う。胴体下面から約40mmのクリアランスを確保。この方法は軽量でクッション性があるのでこの手の機体には最善。 胴体後方に開口を設定。冷却空気抜きだけでなく、手投げ時に指を掛けることを意図している。上手く機能するか? これで飛ばせる状態になった。全備重量は580g、主翼面積18dm2なので翼面荷重は32gと軽量。 あとは胴体側面に機体名、主翼にチェッカー柄を入れるだけとなった。(2020年2月9日)
|