ボート
![]()
◆ファイティングキッド![]()
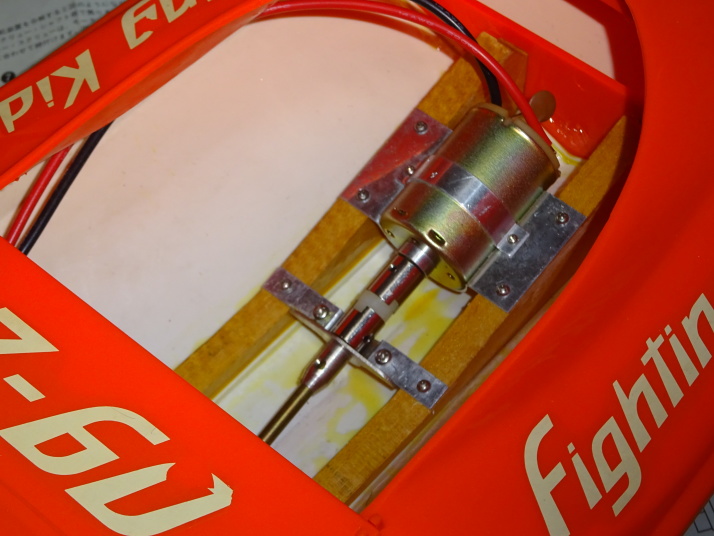
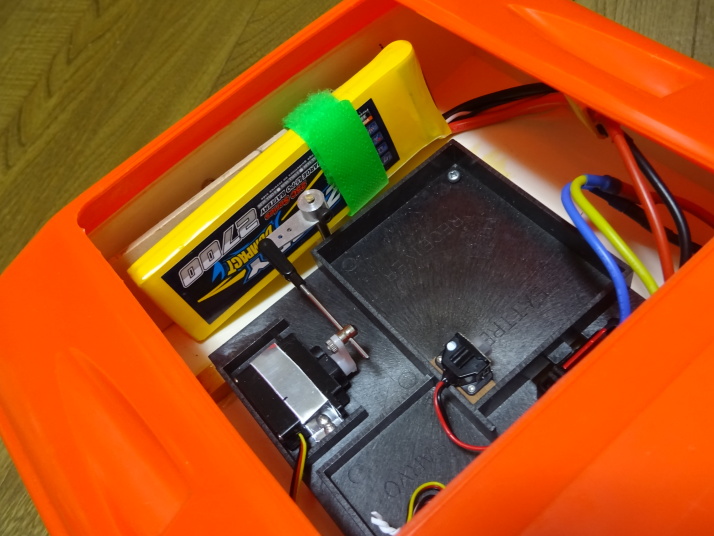
| オークッション 実はお気に入りのジュピター401が川で遭難、しばらくは中州に見えていたがいつのまにか消滅。残念! ボートが本業ではないが時々は走航させてみたくなる。オークションに出品されていた地球堂のこの船体、試しに入札してみると競争相手もなく落札となった。昭和53年発売の40年前のもの。船体はプラスチック製だが保存状態が良かったようで破損なし。強度も確保できているようだ。 全長60cm、幅25cm、重量2kgの船体。昔のラジ技に宣伝が出ていたCADET(キャデット)65によく似た形状。 到着時にモータの取り付けまでは済んでいたが一度バラバラにして作り直し。 完成 モータはマブチRS540S、指定のニッカド電池は6V1200mAh、7.2VまではOK。コントローラは抵抗式のリバース付き。 今回はブラシアンプ60A(Hobbywing)を使用。リポ電池2セル2700mAhを後部に搭載。これでも前重心、150gのウェイトを載せて指定重心となった。 風呂場で進水式、フルスロットルで電流約25A、これはストール状態なので実際の走航時には10数アンペアになるようだ。380クラスのジュピター401に比べると随分推力がある。また、スタンチューブ、シャフトが随分しっかりしており走航中にスクリューが外れる心配はなさそう。 この際なのでプロポは双葉のT3PVを準備。10機分のデータをメモリできるので車もOK(?)。(2020年2月20日)
|
|||||
| 初走航 家の前の室見川はしゅんせつ工事が終了。護岸に沿った一角が水の流入のない池のような状態になった。川の流れが無いのでボートにもってこい。 早朝に出かけて(徒歩1分位)走らせてみた。60cmの船体なので安定して走る。自分の曳波にも負けずに力強く進むのでひとまず安心。 写真撮影のために一度止めてカメラを準備。再度スロットルオンにするも反応なし。ステアリングも作動せず送受信機のバインドが外れたかアンプが死んでしまったのか・・・やば! ここは救助艇の出番。船体を押すのは意外に難しく、何度かトライするうちに上手く船体を横から押すことに成功して無事に回収。 この時点でも全く作動しない。モータ、アンプを確認するが焦げた様子もない。一度電池のコネクタを外して再度接続。すると何事もなく作動。 万一に備えて近くを走らせたがその後にこの現象は出なかった。不思議。精神的に良くないので原因を追及する必要がある。 無事に走航、走る姿は良いです。しかしノーコン状態という課題もでてきた。水物は難しいです。(2020年2月23日)
|
|||||
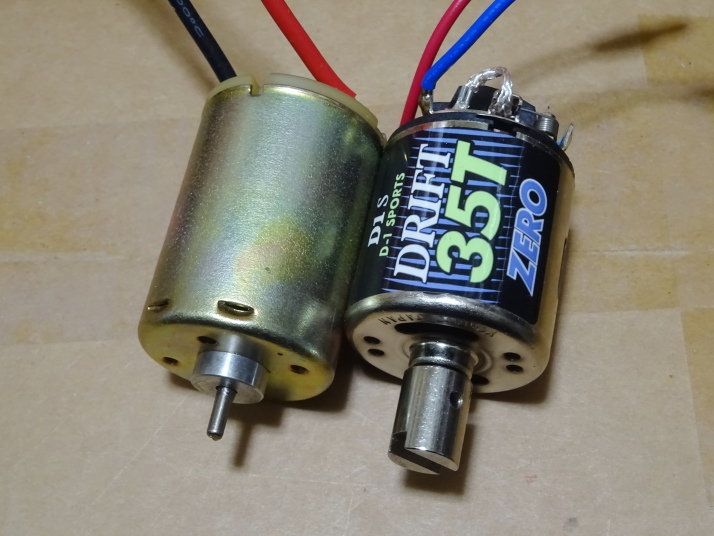
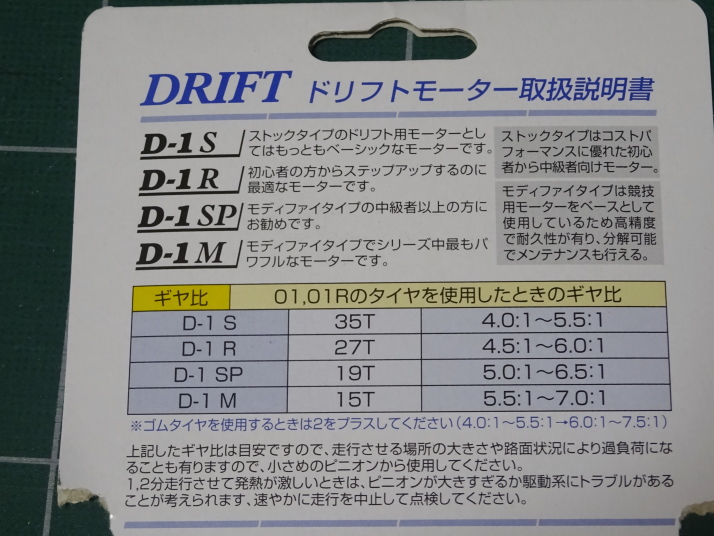
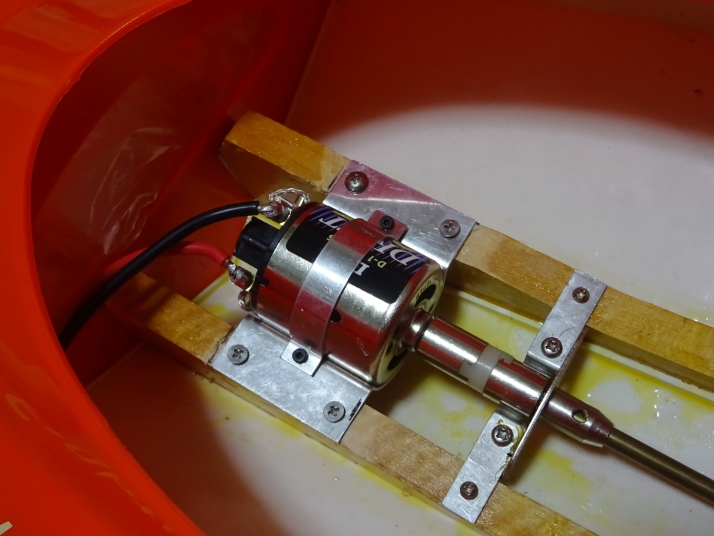
| モータ交換 昨日、再度走航させた。10分間連続して走航、今回はノーコンにならず無事に帰還。5分後に一度回収してモータをチェックしたが異常なし。その後はフルスロットで走らせたが7分を経過したあたりで焦げ臭いにおい?気のせいかと思いながら10分経過したので回収。 モータのコミュータあたりから発煙、モータ自体も熱くなっていた。過負荷だった様子。プロペラは付属の41mm。 マブチの540モータはターン数が27となっている。付属のモータは品番がRS540S、現行のモータはRS540SH、40年前のモータなので本当にターン数が27であるか疑問だがターン数を27と考えて、大きなターン数のモータに交換。 ヨコモのターン数35のD−1Sを選択。このモータを搭載して電流チェック。前回と同じ条件で測定したところ電流20Aとなった(マブチ540では25A)。マブチ540に比べて滑らかに回り低速回転の安定性も優れている気がする。フルスロットル時の推力はマブチ540並みにあるようだ。 これで上手くいかなかったら水冷ブラシレスモータの導入になる。540モータ相当のモータは色々な種類があり、選択の幅は広そう。 しかし、使用頻度、条件からしてブラシモータで十分と思っている。さてどうなることか。(2020年2月25日)
|
|||||
| 完璧! モータ交換後に走らせてみた。低回転でモータが滑らかに回るのは嬉しい。付属のモータはどこか不具合があったのかも。モータ交換時にユニバーサルジョイントが一直線になるようにモータの高さを微調整。そのお陰か前よりも静か。 最高速度はむしろ今回のモータの方が優れている気がする。全体的に性能アップ。 10分走らせてモータを触ると丁度お風呂の温度、45度前後と思われる。もちろん異臭なし。リポ電池は2セル2700mAh、残量は45%。15分は余裕で走るはず。 万一に備えて船首の空間に発泡スチロールを配置。これで実質的に完成。 全備重量は1.4kgと説明書の2kgに比べると随分軽量。もちろん重心指定位置。そのお陰か加速性が良い。近くの川で遊ぶのに文句のない船体となった。(2020年2月29日)
|
|||||
| 走航場所 家の前の専用スペース、幅10m、長さ100mくらいで流れのない池のような場所。休日の早朝7時位から10分程度遊んで引き上げるパターン。 早朝なので人は居ないと思いきやウォーキングする人が意外と多い。階段を下りて水面にアクセスできるが、わざわざ声をかける人もいないので気楽。 本日も無事に回収。水の侵入も最小限で暫くはトラブルなしで楽しめるはず。撮影はセルフ、中スローでシャッターを押すのが精いっぱい。スロットルハイでは意外に早いです。(2020年3月1日)
|
◆救助艇
| 救助艇 ジュピターは家の前の室見川の流れの穏やかなところで楽しんでいる。週1回約10分くらい。先日、浅瀬に突っ込んでスクリューが小石に接触して外れてしまった。幸い浅かったので回収できたが、やはり遭難のリスクはある。 救助艇を物色、ホビキンのプロペラ艇が良さそうなので入手して製作。リポ電池はジュピターと同じものが使用できる。プロペラ艇の宿命でスピンに入りやすいということなので手持ちの古いジャイロを搭載。組み立ては手直しが必要なのはご愛敬(やはり中華製)。 本日進水、風がありこれに伴い波があったが負けずに力強く進む。ジャイロの効果は絶大で操縦が楽になる。スロットルとラダーを上手く使うとほぼその場で旋回、小回りが利くので救助が容易になるはず。 とはいっても救助の経験が無いのでどんなものか。上手くいかない場合でも、この船体自体走らせるのが面白いので良しとする。 リポ2セル1300mAh10分の走航で残量30%、この数字が今後の走航時間の目安。(2019年10月14日)
|
◆ジュピター401
| ことの発端 スーパーラジコンの店長が「どう?」と見せてくれたのが地球堂のジュピター401。 中学生の頃に小遣いを貯めてロジテックの2chプロポを購入、その時に作ったのがまさにこの船体。40数年を経て今も製造販売されているとは驚き。・・・で、即購入。 動力系はマブチ380モータと2セルリポ、もしくはブラシレスモータと3セルリポかな。 箱を開けると懐かしいベニア板の匂いがします。部材はもちろんダイカット、精度の悪さはあたり前で、嵌め合いのスリットは微妙に狭く全て手直しが必要。 キール部はL型アングル上で接着固定して真直ぐに修正。   |
|||||
| 進行中 治具が無いのでキールに対するフレームの位置は目視でしっかり確認。部材の接着は30分エポキシを使用。但し、瞬間接着剤+硬化促進剤という便利なものがあるので、これも併用。作業が容易になります。 製作は意外に面白く順調に進行中。(2015年8月30日)    |
|||||
| 教科書 ボートの製作は実質的に初めてのようなもの、手元にあった1969年のラジコン技術の臨時増刊号が先生。接着剤の選び方や防水方法がしっかり解説されており貴重な資料。 どこで走航させるか・・・第一の候補地は室見川上流。室見川は私のランニングコースの1つでかなり上流までチェック済み、穴場的な場所もあるので小型の電動ボートならまず問題ないと思う。 只今、船底の貼りつけ中、船首部の処理は難しい。やってみて初めて分かることも多く、次の船体はもっと上手くできるはず(製作するかな?)。エポキシ接着剤が相手なので時間がかかります。(2015年9月2日) 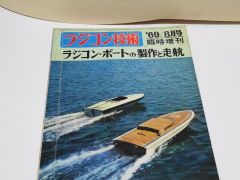   |
|||||
| 再開 同じくこの船体を製作されていた「きむらクラフト」さんから無事進水との報告あり。動画もアップされており、走航する姿はやはりカッコいい。 何とかしないと・・・で再開。まずは動力系部品の調達。モデルショップキャプテンさんから、モータマウント、冷却用マウント、ユニバーサルジョイントを入手。モータはきむらクラフトさんも使用されているハイペリの1913-06を使用。 船体は少しずつ進行中。基本構造は完成。部材の形状を修正しながらの作業、神経質にならないのであれば意外に面白い。(2016年4月17日) 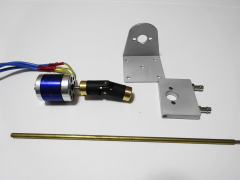  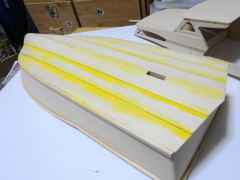 |
|||||
| 動力系 モータの固定は現物合わせで何とか上手くいった。シャフトブラケットを船体にエポキシで固定して完了。 次は、船体全体のサンディング〜防水処理。(2016年5月1日)   |
|||||
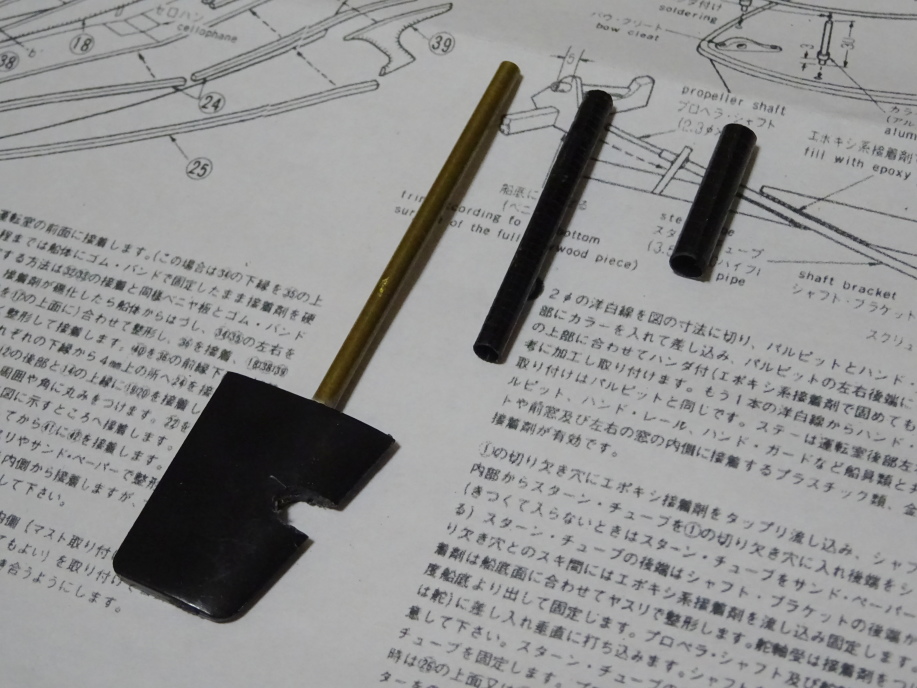
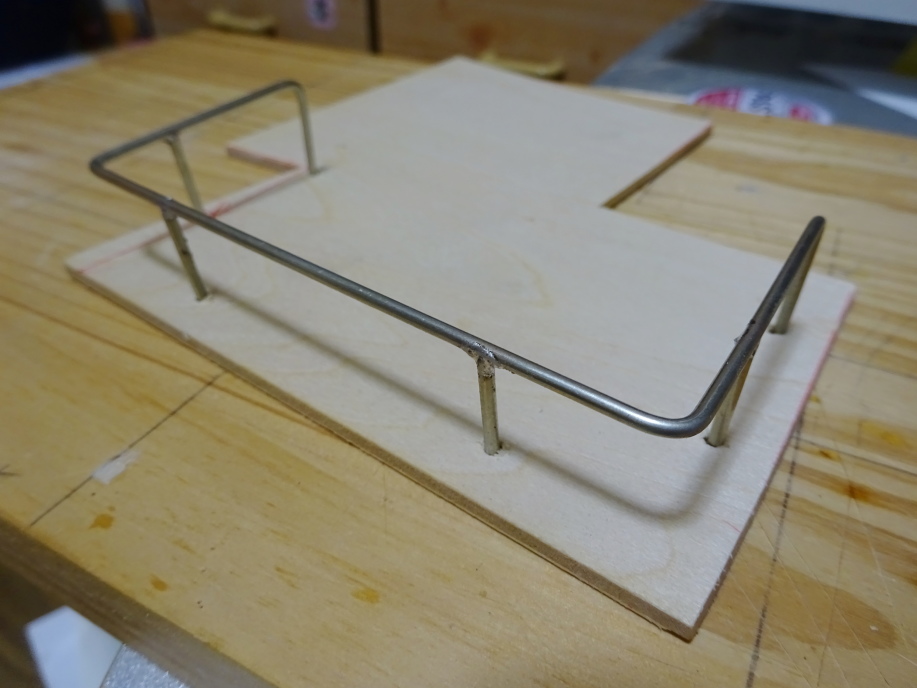
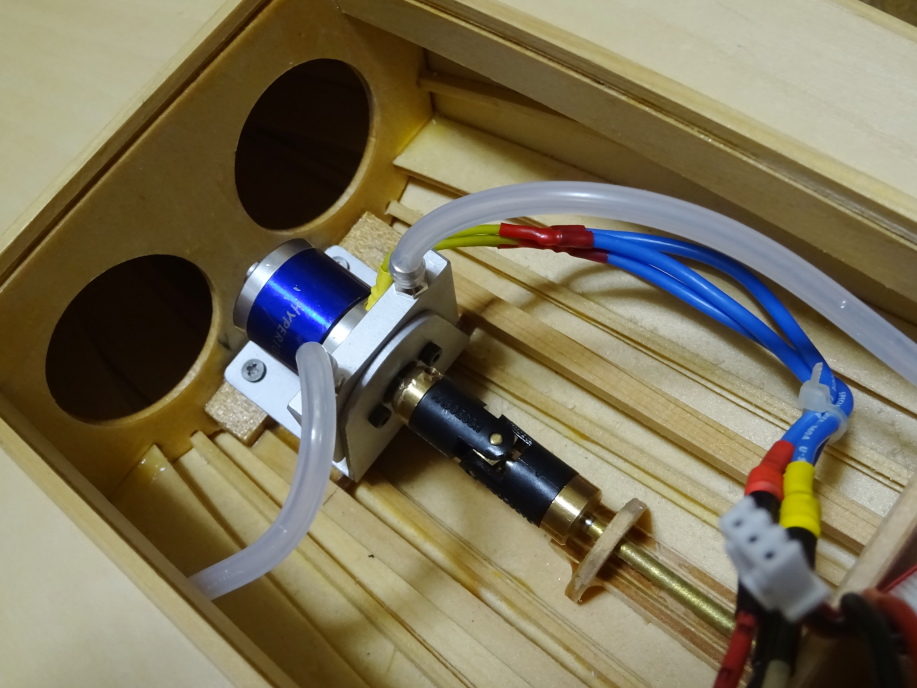
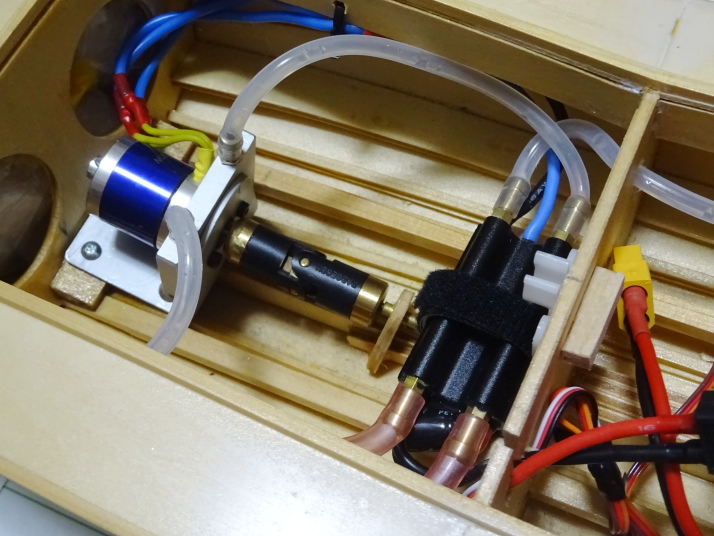
| 再度再開 気が付けば2年以上放置状態。これ以上放置するのも如何なものかと考えて再度再開。 まずは水冷経路の確保。ラダーの回転軸を中空のものに置き換えてここから給水。ラダー軸の外筒はカーボンロッドを利用。給水OK! ハルビット及びハンドガードを付属の洋白線から製作。半田付けも上手くいった。意外に綺麗にできるものと感心。
|
|||||
| 下処理 ベースにクリアを塗布してサンディング、3度同じ作業を繰り返すと滑らかな表面になった。自分的にはこの程度でOK。最後にウレタンクリアを塗布すれば光沢が出るはず。 着色作業は乾燥時間を要するので焦らずに進める必要がある。来年の春には進水できるペースかな?(2018年9月26日)
|
|||||
| 塗装中 塗装は白をベースに船底がブルー、デッキは無着色とした。塗装方法はネットや古いラジ技で情報収集。しっかり乾燥させながら作業を進めるべきだが、早急にやりすぎて失敗も多い。遠くから見れば問ないような気がする。 配色がシンプル過ぎて見栄えしない。工夫が必要。最終的にはウレタンクリアを塗布する予定。(2018年9月20日)
|
|||||
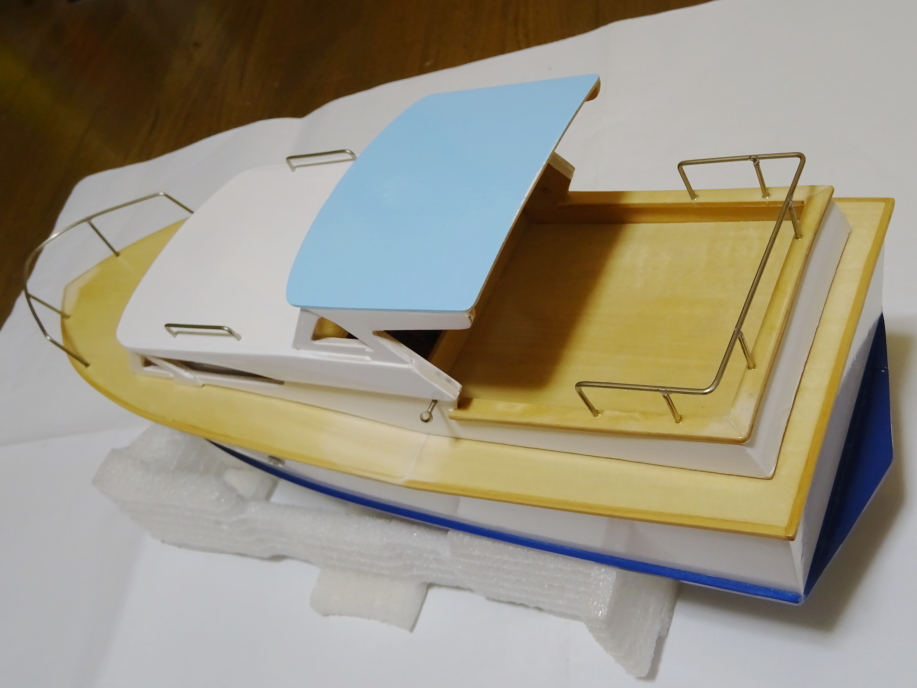
| 試運転 塗装はどこまでやるか際限がないの適当なところで完了とする。それでも表面は結構滑らかになっている。手すり及び窓をとりつけて外回りが一応の完成。 動力系および冷却系を接続。冷却系の確認のために洗面台に水を貯めてモータON。給水OK!船内への水の侵入はなく防水も上手くいっている。(2018年10月8日)
|
|||||
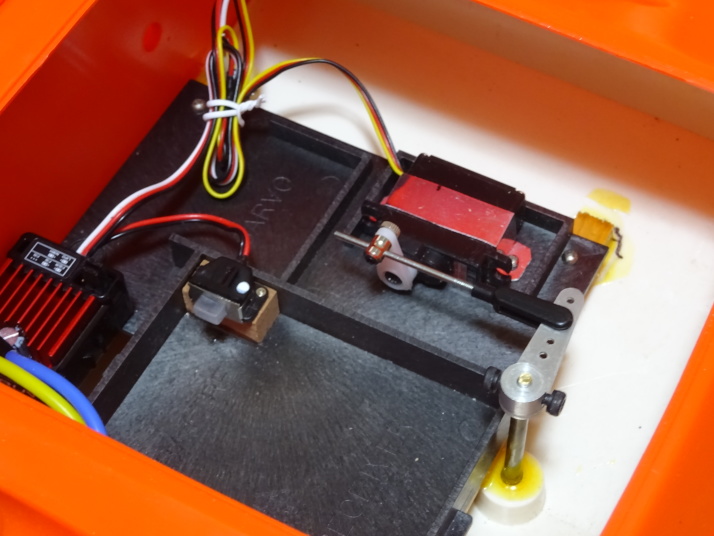
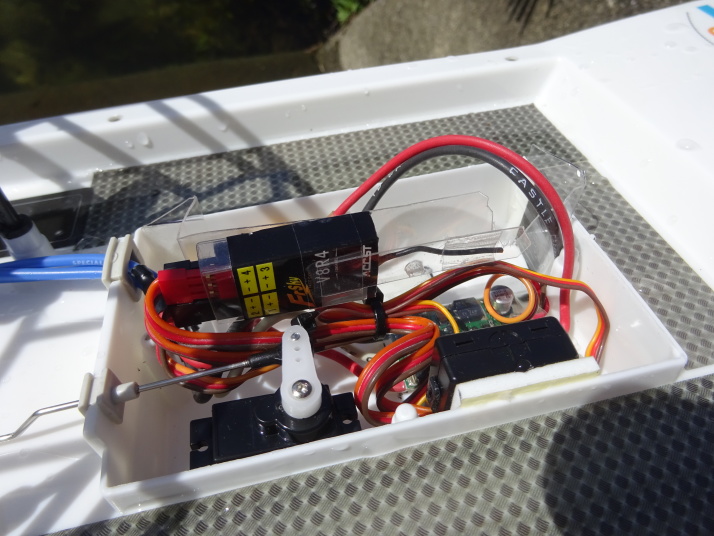
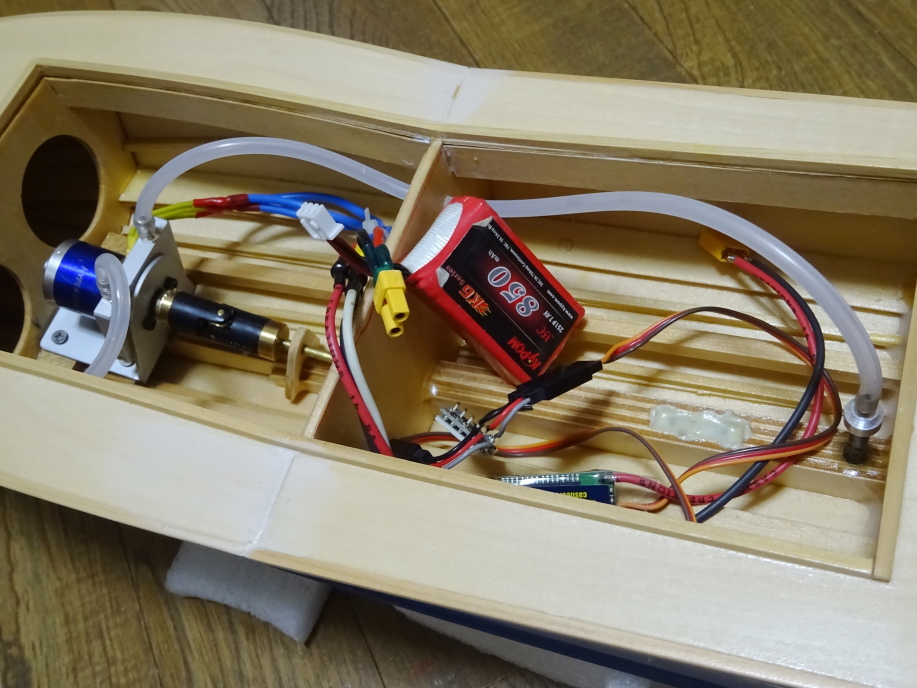
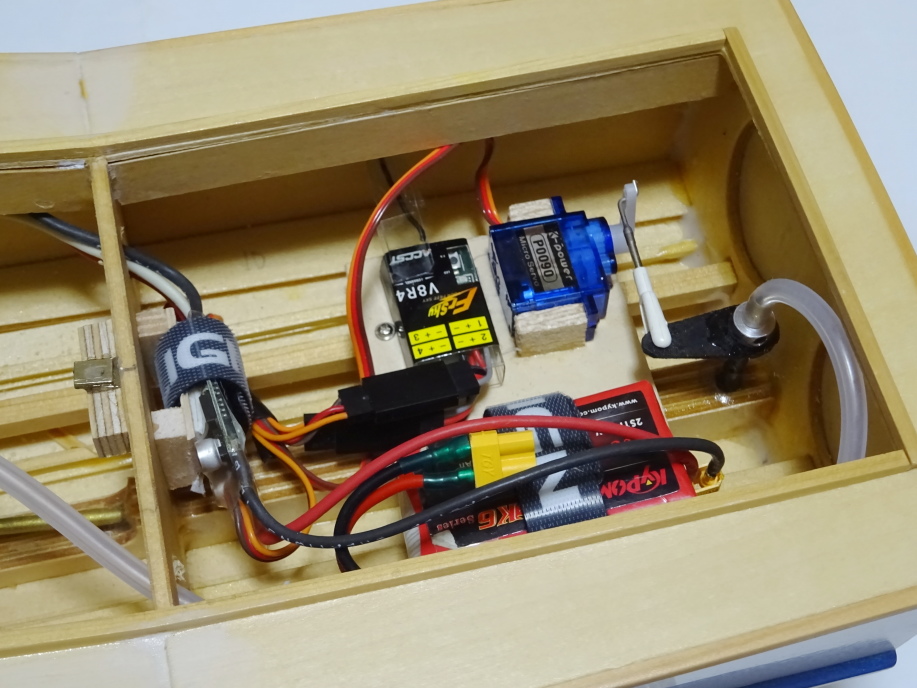
| メカ搭載 メカ搭載用のプレートを作成し、この上にサーボ、受信機、リポ電池を搭載。アンプは縦壁に固定した。ラダーは9gサーボ、トルクは充分なはす。 モータ出力軸にはユニバーサルジョイントを準備したが、試運転で大きな力がかかる様子がないので、ばねジョイントに交換。このほうが振動を吸収してくれるので良さそう。 キャビンの船体への固定は磁石を利用。走航中に外れることは無い・・・ハズ。
|
|||||
| (一応)完成 マストを固定して、基本部分が完成!幾つかの小物部品の製作及び取り付けは後日。洗面台では浮いているので進水は問題ないと思う。 大安吉日に進水式を予定。
|
|||||
| 進水! 沈没対策で船体前方室に発泡ブロックを袋につめて配置。きむらクラフトさんの記事を参考にしました。 そして進水式。場所は家の前の室見川、徒歩2分の所に幅5mくらいの分流があり階段で降りられるようになっている。万一の時も回収がやり易そう。 でもって、無事に進水、ハーフスロットル以下で行ったり来たりして異常がないことを確認。速度を上げるのが怖いので、プレーニングに入れることができなかったが今回はこれで満足。全速走航はもっと広い場所で行いたい。 課題も明らかに。左右方向の重量バランスが悪く船体が左側に傾く。電池の位置を右側にする必要あり。 何はともあれ完成して無事に進水、良かったです。(2018年10月13日)
|
|||||
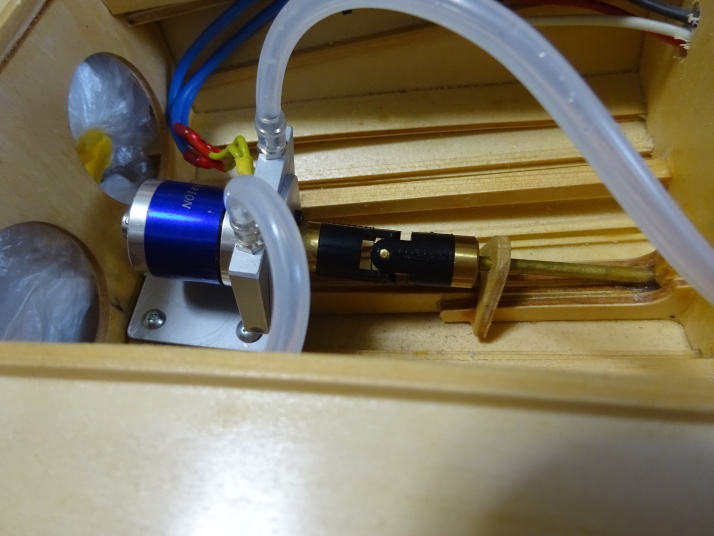
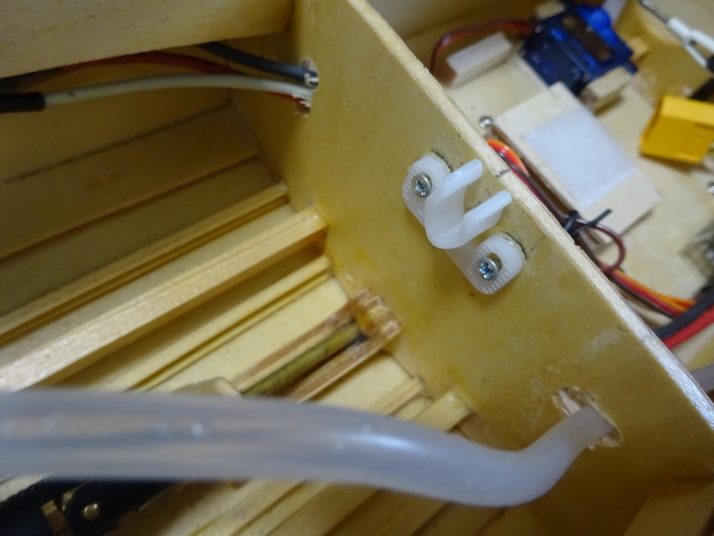
| プレーニング 昨年の10月から久しぶりに整備。まずはバネジョイントをユニバーサルジョイントに戻し、少しでも抵抗を低減するためにモータとドライブシャフトの位置関係を微調整。無理なく回るようになった。 キャビンの固定は磁石としていたが走航中に外れるのが嫌なので、ホームセンターで見つけたプラ製のドアキャッチャーでしっかり固定できるようにした。 自宅前の室見川の分流箇所で走航。今回はプレーニングに入れることができた。小さな船体なので波の影響を受けるが、転覆することもなく何度も往復。室内への水の侵入もなく一安心。 近々、市内のため池でデビュー予定。(2019年8月12日)
|
|||||
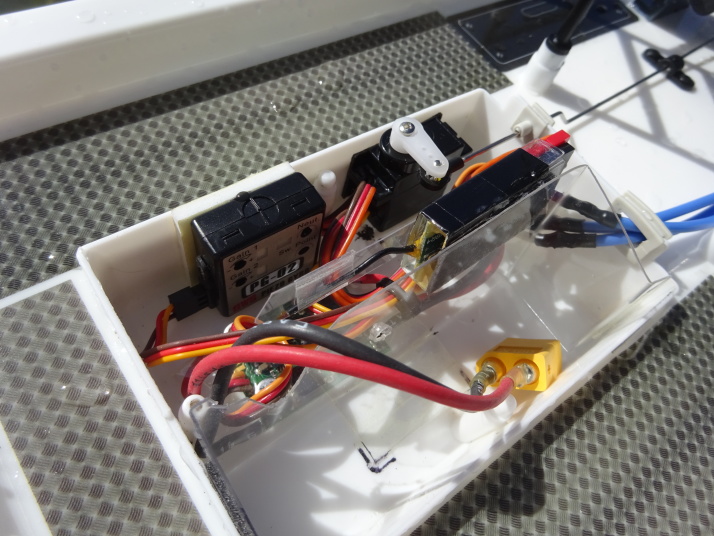
| 進化 2度目の走航でフルスロットルで走らせることができた。意外に高速で走るが自分の引き波の影響を受けてあわや転覆しそうになった。適度なスピードで遊ぶに越したことはない。 約10分走らせて電池50%消費、一人で遊ぶ場合は10分が限度なのでリポ電池一本でOK。 プロポをホイール式に変更、これに伴いアンプを水冷式のバック付きに交換。試験では冷却系は上手く機能、バック可能になったので非常時の脱出が可能になり少し安心。随分進化した気分。(2019年8月20日)
|
|||||
| 本領発揮 遂に広い水面で走らせることができた。飛行機仲間のMさんの地元の静かな池、高速艇は時速50km超え、結構安定して走るのに驚いた。 ジュピターはフルスロットルでは自分の波の影響で跳ねることもあるが急な舵を切らない限り転覆することはない。 広い水面で大きな旋回半径で走らせるとスケール感がある。ホイールプロポの操縦に慣れてきたのでスロットル操作とホイール操作とを上手く連動させながら旋回半径を調整して綺麗な旋回を目指す。面白いです。 もう少し大きな船体が欲しくなるところ・・・。 動力系はトラブルなしで冷却系も上手く機能、中学生の時に一度作った船体、半世紀を隔ててやっと広い水面で自在に走航させることができた。満足!(2019年8月25日)
|