EPP機
![]()
<小型機 60cm>![]()
| 60cmクラスを製作 久しぶりにフィッシュボーン方式で製作、やり方は覚えていました。材料は手元に在庫あり。 メカ類は当時よりも進歩しており45g位、機体が25gとすれば70gで完成する予定、実際はどうでしょうか。   |
| 道具 HKのワイヤーストリッパー$2.39、侮ってはいけません。先端が細いので狭いところでも使用可能で切れ味も問題なし。配線の途中を裸にして半田づけするのも容易になりました。 本機の配線は、軽量化のために全て直結の現物合わせの立体配線。このストリッパーが大活躍しました。しかし、この工法は老眼の方にはつらい作業かもしれません。   |
| 完成 モータはハッカー製で威厳あり(笑)、さらに電池は2セル180mAhのハイぺリオン製、一流品を揃えました。 リンケージはすべて1mmカーボンロッドを使用。良く考えるとカーボンをふんだんに使った贅沢な機体になりました。 全備重量は何と75g、前作が86gなので、いきなり11gの軽量化に成功。 部屋の中でホバリング、軽いだけに姿勢が崩れても修正が可能。正しい姿勢になるといきなりトルクロールを始めます。 オーバーパワー気味なのでスロットルカーブをいじって中スロットルで40%に設定すると随分扱いやすくなりました。 良い感じに仕上がりました。来週のインドアには本機とFPV仕様のクワッド機を持参する予定です。(2013年9月16日)    |
<Techone KATANA EPO>
| 久しぶりの発泡機 アウトドア用のEPP機の最後はスナイパーで2007年製作なので既に5年経過。その間に機体も進化したようで、最近は仕上がりの良い機体が見受けられます。 今回は、評判の良いTechone KATANA EPOを入手。モータ込みで8500円弱。 ※輸入元のワールドモデルスさんのHPからの引用です。 この機体は、EPP素材で爆発的なヒットをした、YAK54や、EXTRA330と、EPO素材のVENUSの良さをミックスした、素晴らしい仕上がりの3D機です。大きさも従来のYAK54やEXTRA330よりも大きく、風にも強い飛ばし易い機体です。    |
| 主翼/胴体ともに事前にカーボン(?)ロッドが挿入され、更に、カーボンロッドで主翼、尾翼周りを補強する構造。素材の硬度と相まって非常に剛性の高い機体、スナイパーとは比較になりません。 メカ類は上手く隠れるようになっており、電池は蓋付きの空間内に納めるようになっている。しかし、この空間の奥行きは少し狭く、1000mAhの電池の厚さ20mmでは蓋が閉まらない。5mm程度削ると上手く閉じるようになった。    |
| 完成 初飛行の一発目、5秒でいきなりペラが折れて終了。 そういえば以前はプロペラセーバを使っていたので多少のことではペラは折れませんでした。この機体は600gオーバーなのでペラセーバを使うのもどうかと思うのでモータ直結でした。少し慎重に離着陸を行う必要があります。 ペラを交換して4フライト、3D機なので最初は戸惑いましたが少しずつ勘が戻ってきました。 パワーはホバリング状態からロールしながら上昇できるだけ十分にあります。コブラ系も得意でフリーフォールも簡単にできます。 背面コブラでのラダー打ちがスムーズにできませんでした、慣れが必要です。 普通に飛ばすのも面白い機体です。剛性が高く多少の風は問題なし。これまで飛ばしたEPPの中では一番真っ直ぐに飛びます。 暫くは楽しめますが、分解不可で1m×1mの面積を専有するのが悩みです。ペラの予備も揃えて来週の準備完了。(2012年11月11日) (メモ) リポ850mAhで7分飛行→残量20%   |
<アニマル(デプロン製>
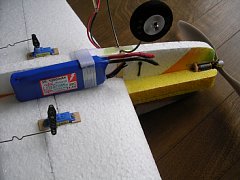
| この機体は4年前にHobby Lobbyから直接購入、これを型にして色々なEPP機を製作しました。 先日久しぶりにインドア飛行会に参加して良く飛ぶ機体が欲しくなり、今回、このデプロン機を製作。 機体の製作はサクサクと完了。 モータはE-MAX BL1806/25 1650KV (19g) アンプはHiModel 6A ブラシレスESC PROFESSIONAL-6A (6g) サーボはPowerHD HD-1550A (6g) 受信器はGWSの4ch ペラはAPC8×3.8    |
| 完成 重量は130g(電池無し)、電池をハイペリオンの180mAhとすると+13gの143gとなる。 最近のメカは軽いので簡単に130gの機体が完成します。 ホバリング時の電流は2.5A(18W)以下。この電流なら180mAhでも大丈夫と思われる。 部屋の中でホバリングやトルクロール、さすがに安定しています。次のインドア飛行会はいつかな(2010年7月3日)    |
リビング宙返りに成功:「動画」→「電動機」→「animal 60cm 宙返り」
 アニマル50cmの性能も分かってきた。室内で安定した旋回するには少し大きい方が良いと考えて、今度は75%(60cm)を製作。今回は同じものを3機製作して知人にも飛ばしてもらうことにした。 アニマル50cmの性能も分かってきた。室内で安定した旋回するには少し大きい方が良いと考えて、今度は75%(60cm)を製作。今回は同じものを3機製作して知人にも飛ばしてもらうことにした。機体を切り出したがEPPシートから切り出した状態で12g。カーボン補強後では20g位になるだろう。全備重量80g後半で製作できるハズ。(2007年6月3日) |
| 機体完成 先に2機を製作して納品、最後に自分の機体のメカ積み、仕上げとなった。 機体のみの重量は23g、これに胴体コーナ部の補強用EPPシートを加えて25g。 この機体もモータはHACKER A10-15S、バックマウント部材を機首に形成したスリットに差し込んでスーパーX2で接着、その後グラステープで補強。 サーボはブルーアロー3.6gを3個、アンプはフェニックス10、受信機はGWS4ch。リポ電池はHPの2セル300mAh。 でもって、完成重量(電池込み)は92g。機体が大きくなると接着剤の量も増えるので重くなってしまい、90gtを切ることができなかった。  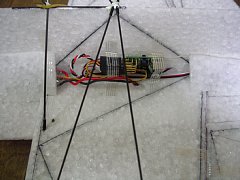  |
 飛行 飛行初飛行は今回も部屋の中で行った。ペラはGWS6030を使用。予想通りアニマル50cmに比べると挙動が穏やかで、多少姿勢が崩れてもリカバリー可能。ペラ6030の場合は反トルクが弱いのでアニマル50cmに比べてトルクロールに入り難い。従って、コブラ状態で部屋の中を移動することが容易になった。 ホバリング状態から徐々に高度を落として着陸することもできた。 ペラをGWS7035に変えてみると、反トルクが大きくトルクロールに入り易くなる。部屋の中では6030が良いみたいだ。。 部屋の中で飛ばす場合、スロットルの操作が鍵になる。この機体に積んだアンプのフェニックス10(初期型)はスロットル中域まではパワーが出にくく、中域以降で急激にパワーが出る(同じメーカのサンダーバードは比較的リニアな出力特性)。 このことは他の機体でも感じていたが、今回は特にその傾向が顕著で、飛ばしにくい(高さ調整が難しい)。暫く飛ばして慣れる必要があるが、送信機(X3810)をヘリモードにしてスロットルカーブを調整すると楽になるハズ。 何度かラダーから着陸(墜落)したが無傷。この機体は着陸もどきができるので操縦ミスをしない限り壊れることはないだろう。ペラは6030と7035とをそれぞれ10本用意したので安心。(2007年6月13日) |
 体育館で飛行 体育館で飛行初めて広い場所で飛ばしてみたが安定性は想像以上。直線飛行/背面飛行/ロール/ループ等、少し重量のある80cm級の機体に負けない性能を持っている。フリーフォールはアニマル80cmに通じるものがあり、なかなかの性能。 一方、アニマル50cmは少し操縦が難しくこれはこれで面白い。調整していけば飛ばしやすくなるが、アニマル60cmが高性能なので50cmの機体は不要というにが結論。 ところで肝心の室内宙返りだが、障害物の無い体育館の中であれば自宅の部屋の天井の高さで宙返りできる。が、部屋の中では障害物が多く難しいかな・・・と思う。(2007年6月16日) |
| リビング宙返り成功 機会があって広いリビングで飛ばすことができた。広いといっても日本の住宅なので外国の様には行きませんが・・・。 障害物が少ないのでコブラロールが出来そうな気がしたが・・・実際は難しく断念。宙返りは吹き抜けの場所で成功!これで一応初期の目的を達成できた。 「動画」→「電動機」→「animal 60cm 宙返り」 (2007年6月24日) |
| 更に軽量に! リポ電池にHiModelの2セル200mAhを使用、重さ14gで20Cの性能。以前よりも−6gの全備重量86gとなった。 ホバリングで電流は1.2A(9W)、1Wで10gを吊ることができる。小電流なのでリポ電池への負担は少ないハズ。 部屋の中でホバリング/トルクロール/コブラ前進/コブラ後進をやってみると、以前よりも飛ばしやすくなった。 軽量化により、姿勢が崩れた場合に慣性で移動するという傾向が弱くなり、コントロールし易くなった。 本機は製作から1年経過しているが、宙返りをしてからほとんど飛ばしていないので新品同様。 もう少し部屋の中で頑張ってもらおうと思っている。(2008年10月9日)   |
<アニマルEPP50cm>
動画 (電動機→animal 60-001)
| ハッカーから新しいモータが出た。HACKER A10-15S、何と15g。 このモータを使えば100g未満の機体を作るのが容易になる。 以前作成したアニマルEPPを60%に縮小すると翼幅48cmになる。全備重量80g台で製作すれば良く飛ぶような・・・気がする。挑戦する価値はありそう。 3mmEPPシートから切り出してみると10g。これにフィッシュボーンを施すと20g位で仕上がると予想。これに、 モータ、4gサーボ×3、アンプ/受信機/300mAhリポを載せると、90gを切れそうな気がする。 しかし・・・うーんと唸るほど小さいです。(2007年5月10日)   |
|---|
| 機体完成 EPP素材にフィッシュボーン加工を施し、1.2mmカーボンロッドの脚と主翼支持ステーを取り付けた状態で16g。 搭載メカは、 WP3.8サーボ×2、JR6gサーボ(エルロン)×1 受信機GWS4ch アンプ サンダーバード9A モータ ハッカーA10−15S リポ電池HP300mAh ---------------------- 合計82gになった。コード類をカットして軽量化を図るが、リンケージ類と多少の補強が必要なので、結局は82g程度になると思われる。(2007年5月13日)    |
| 完成 胴体裏側のコーナ部にEPPの3mmシートを貼り付けて剛性を確保。 エルロンサーボはブルーアローの3.6gに変更。リンケージはエレベータ、ラダーにカーボンロッド、エルロンには0.9mmのピアノ線を使用した。 現段階では軽量化のために受信機のプラケースを外しただけ。この状態で83g。    |
 初飛行 初飛行部屋の中でホバリングをさせ、推力と釣り合うスロットル位置で電流を測定、1.5A(10W)であった。ペラがGWSの6030でありSF系のペラよりは効率が悪いように思う。参考までに原寸(翼幅80cm弱)のアニマルは8×3.8SFで1.9A(14W)だった。 今回の目玉のハッカーのモータは、回転が滑らかで静かである。ペラが6030のせいもあるが、レスポンスが良いのには驚いた。アンプ(サンダーバード)との相性も問題ない。 本日はホバリングしかしていないが、想像よりも挙動が穏やかで、集中力が維持できるなら、部屋の中でトルクロールを続けることも可能。しかし、(当然のことながら)原寸のアニマルの安定性には及ばない。写真左が原寸のアニマル、右が60%アニマル、この大きさになると4gサーボでも大きいなあと感じる。 まずは軽量化に取り組み80gを切ることを目標とし、その後に飛ばしながら調整。50cm×50cmの機体ながらポテンシャルは高いと思う。(2007年5月24日) |
| 軽量化 リポ電池、HP300mAh2セルは2mmコネクタ付きで20g、シュリンクを剥いで-1g、コードを最短にして-2gで約17g、これが限界。これでもって全備重量が80gになったかというと82g。電池の収容部周辺や気になるところを補強したりしたので余り変わらなかった。 市販のメカを無改造で使用する場合、この大きさでは機体の強度とのバランスで80g前後が限界と思われる。リポ電池を200mAh程度に変えれば数グラムの軽量化も可能だが電池のパワー、信頼性に問題がある。これ以上の軽量化の努力は無駄と思われるのでやめることにした。結局は60cm×60cmの機体を作った方が良さそうである。 |
| 飛行 風のない夜間の公園で飛ばした。原寸のアニマルに比べて飛行速度は上がってしまうがコントロール出来る範囲。ロール、ループも問題なし。欠点は旋回時に巻き込み傾向があること。この大きさと重量なので仕方ない。 部屋の中で2フライト。初めはエクスポを80%入れたが逆に機体が暴れるので40%に落とすと操縦しやすくなった。機体に慣れてくると部屋(6畳)の中でトルクロール→エルロン右に入れてホバリング→この状態で前後左右に移動することは出来るようになった。しかし移動可能距離が短いので45度のコブラ飛行が出来るまでには至っていない。これが出来れば一気に宙返りできるのになあ・・・住宅事情が恨めしい。 リビングなら倍の広さがあるのだが・・・(機体と電化製品の破損の)リスクも大きいし・・・もう少し練習して自信がついてから挑戦。 何度もラダーから着陸したが、さすがに80gの重量になると益々壊れ難く思い切って練習できる。(2007年5月26日) |
| 練習 本日、風が強く外で飛ばせなかったので部屋の中で5フライト。慣れるに従って大胆になってきた。 動画 (電動機→animal 60-001) 機体は極力左右のアンバランスを無くすために電池を機体中央に縦方向に配置。これによりトルクロールは安定してできる。 ペラセーバに使用したのは直径15mmの輪ゴム。不思議なことに輪ゴム2本よりも1本の方がモータのレスポンスが良い。ペラをセーバに強固に取り付けると逆に振動が出てレスポンスが悪化するのだろうか。(モータ、ペラが小さいので影響が出るのだろうか) ペラは、GWS6030と、GWS7035を6インチにカットしたものを試した。7035の方はピッチが少し深いせいかトルクロールに入りやすい。コブラ飛行するなら6030が良い。 ホバリング状態で前後左右するのは簡単だが、コブラ状態で旋回するのは難しい。旋回を抜ける際のスロットルワークが微妙であり、余分にパワーをかけると機速が上がり部屋の中ではどうにもならない。何度か成功したが、もう少し練習が必要。(2007年5月27日)   |
 現在EPPの主力機は一昨年末に製作してエクストラEPP。アウトドアの風の中でも元気に飛び回るので気に入っていた。 現在EPPの主力機は一昨年末に製作してエクストラEPP。アウトドアの風の中でも元気に飛び回るので気に入っていた。最近はバルサ機が主体でEPP機への興味は薄れていたが、今年になって1m×1mの大型のEPP機が数種類発売され始め、今後のトレンドになるように思う。どんなものか興味が沸いてきた。 兄弟機の1.6mの機体にも興味があり購入を検討。しかし、1.7Kgの機体を吊るにはKV値の低い大型モータでは4〜5セルが必要。出費が大きくリポの管理に自信がなく断念。 ということで、小型のスナイパー3Dを購入。カラフルな塗装がナイス。 |
  現行エクストラEPPと大きさを比較してみると・・・デカイです。巨大な動翼はトルクロール、コブラロール時に威力を発揮するハズ。 現行エクストラEPPと大きさを比較してみると・・・デカイです。巨大な動翼はトルクロール、コブラロール時に威力を発揮するハズ。EPPは発泡率30倍程度で、丁度、タイヨーのゼロ戦52型に使われているのと同等か。 機体は熱線で切り出されているようで、精度が高い。 塗装は上手くされており視認性が良さそう。 (2007年3月9日) |
| 組み立て開始 最初に左右の主翼を接着。説明書では低粘度瞬間+ターボ(硬化促進剤)が指定されている。低粘度の瞬間接着剤の流動性を利用して大きな面積を接着するのだが、これまでの経験で瞬間接着剤を多用するとEPPがボロボロになる。使用量を減すために、面接着する場合、中央部にスーパーXを塗布して貼り合わせ、周囲の隙間に中粘度の瞬間を流し込んでターボで硬化する方法とした。 この機体の塗料は変な臭い(カビ臭)がする(それほどひどくはない)。また、塗料は硬化促進剤に弱く、特に黄色は硬化剤の乾燥前に触ると手に色がつくので注意。 連結した主翼の表裏には付属のアルミ棒を埋め込むようになっている、が、これは1.2mmのカーボンロッドに変更。 胴体も主翼と同じ方法で接着、胴体側面の補強もやはりカーボンロッドに変えた。 エルロンは1サーボが指定されているが、リンケージに無理があるので、2サーボに変更。サーボの固定はベニヤ板を接着してネジ止めとした。ラダー、エレベータもベニヤ板を胴体に接着して同じ方法で固定した。   |
| エレベータは5mmのスチレンペーパ。動翼はヒノキ棒で連結するようになっており強度は十分だが、このヒノキ棒も3mm×1mmのカーボンロッドに変更。動翼の裏面に3mmの深さの溝を作り、エポキシ(5分硬化)を充填した後にカーボンロッドを押し込んで固定。 ラダーはEPPであるがヒンジが特殊でピンヒンジ。この構造はこれまで使ったことがないので却下。動翼をVカットし、OHPシートを差し込んでスコッチのプラスチック用で固定。この構造は単純で耐久性がある。動きもスムーズ。    |
| 前脚はスリットが形成された部材に差し込み、ピアノ線の弾性で固定する構造。脚の取り外しが可能なので便利。 テールスキッドはU字型に曲げたピアノ線を胴体に差し込む構造。これはベニヤ板を胴体に接着し1mmピアノ線を固定する構造に変更。   |
| あとはホーンの埋め込み、リンケージ、配線類の整理、固定を残すだけである。しかし巨大なラダーである。 今の状態で、電池込みで404g、これまでで一番重いEPP機だが、持ちあげると「軽い」と感じる。これは機体の大きさの割に軽量だからであろう。 (使用機器) モータ:GWS2212/13T アンプ:サンダーバード18A 受信機:ハイペリオン/ベルグ6ch サーボ:エルロンWP060×2、エレベータ/ラダーWP060BB 電池:3セル800mAh    (GWSモータについて) モータはピッツに搭載したトリムコーポレーションの2215Mを考えていた。計画では、ピッツは初飛行→撃沈するハズだったが,残念ながら(?)まだ飛べる状態にある。急遽GWSに変更。GWSモータは性能的に??であるが、機体に取り付けて回してみたところ調子がよい。 このモータ、手で回してみると滑らかに回らなかった。どこか干渉しているのかと思って缶をハズしてみると・・・驚いた。 缶とベアリングとの間にベアリングのアウターレースと同じ外径のワッシャが入っていた。これをインナーレースの径と同じワッシャに交換すると滑らかに回るようになった。ついでに折れると評判のシャフトを別のシャフトに交換。シャフトのDカット部やEリングの溝が深すぎてここから折れるようだ。(2007年3月11日) |
| 完成! アンプは放熱を考えて胴体にタイラップで固定。受信機はEPPを切り取って押し込んだ。 受信機とサーボ間の配線は延長コードを使用せずハーネスを適当な長さにカットして直接半田付け。配線はEPPに切り込みを入れて挿入した。アンテナ線は胴体下部に沿わせた。    |
| キットには専用のリンケージパーツが入っている。アルミロッドと長さ調整可能なコネクタ(サーボホーンに取り付ける)を使用する構造だが、アルミロッドとホーンの穴の径が微妙でガタがあった。ここはいつものように1mmピアノ線を使ってリンケージ。動翼側のホーンは付属のものに1mmの穴を開け直して利用。 エレベータ/ラダーは普通のサーボホーンで舵角(±50度ど)を確保できるが、エルロンは舵角が取れないのでサーボホーンを延長した。 胴体には脚を取り付ける支持部材(木材)が挿入されるが、EPPと木材との接着強度が心配なのでグラス板を掛け渡してエポキシで固定。脚を取り外すことはできなくなった。 電池はアンプと反対側の胴体側部に固定。組み立てマニュアルでは、電池は黄色い胴体補強用EPPの上側に配置するようになっている。これは1サーボではリンケージが邪魔をして胴体下側(主翼裏面側)に電池を配置できないためと思われる。 部屋の中で推力チェック。中スロットルでホバリングできることを確認。このGWSモータは調子良さそう。 少しホバリングさせてみると、安定性が高く(座りがよい)舵もよく効くみたい。期待できる。 以上で飛行準備完了!(2007年3月14日)  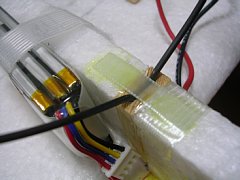  |
 初飛行 初飛行飛行前に電流チェック。ペラ GWS10×4.7SFで13A(130W)、もう少し負荷をかけようと思いAPC11×3.8SFで試してみたがレスポンスが悪いので結局10×4.7に戻した。 飛ばした感じは、まさにEPPのファンフライ機。重量があるだけに、どっしりとした安定感を味わえる。挙動は穏やかで非常に操縦しやすい。 エレベータ/ラダーの効きは十分、どんな姿勢からもリカバリーが可能で、トルクロールが容易。コブラは正面/背面共に安定。 エルロンの効きが悪いなと感じたが、後で調べてみると±25度しか動いていなかった(事前の目視でのチェックがいい加減だった)。 ナイフエッジの浮きは良く変な癖もないようだ(本日は風が舞っていたのでナイフエッジの癖をとれなかった)。 モータは調子が良く普通に飛ばすのなら十分。小気味よく飛ばすのならもう一回り大きなモータを使って11〜12インチのペラを回すのが良いと思う。 低翼面荷重で風に強い方ではないが、それでも80cm級のファンフライ機よりは風の中で飛ばしやすい。 機体が一回り大きいだけに持ち運びに注意が必要。車に載せるまでアチコチ当ててしまいました。慣れの問題。 カラーリングのお陰で遠くに行っても姿勢が分かりやすく、アウトドアでのEPP機の主力機になった。(2007年3月17日) |
  パワーユニット交換 パワーユニット交換モータをピッツにも使用した2215Mに交換。GWSのSFペラ(軽量でレスポンスが良い)を使えるように、モーターシャフトをフロント側に移動させた。 これに合わせてリポ電池3セル1200mAhが使えるように構造変更。 部屋の中で回してみるとGWS10×4.7で18A(180W)流れた(アンプの限界?)。 推力、レスポンス共に良好。凄いパワー。機体重量は+50グラムの470グラムになってしまった。本日は雨で飛行お預け。(2007年3月24日) |
| モータ交換後 少し風が強い中で実際に飛ばしてみた。パワー十分、どこまでも上昇可能でレスポンスも良好。どんな姿勢からのリカバリーも容易。 リポ3セル1200mAhの場合は500g近い重量のためかスロットルスティックに重量を感じ、以前飛ばしていた50クラスのファンフライ機の感触を思い出した。風に強く上空を思い切り飛ばすのに適している。800mAhに交換してみると−40gの効果大で軽快に飛び回る。モータの交換は成功。 エルロンのギヤ欠け発生。着陸時にエルロンが地面に接地したようだ。重量があるだけに機体への衝撃が大きく気をつける必要あり。 動画→「電動機」「sniper20070325.wmv」 (2007年3月25日) |
| サーボ交換 これまで2回エルロンサーボのギヤ欠けが発生。6gサーボなので仕方ないがギヤ交換も面倒なのでサーボを交換。 サーボはコロナのデジタルサーボDS-928BB。 このサーボは製作中のスカイカンガルー用にと購入したがこの機体にはあまり意味がないので急遽スナイパーに使用。 折角なのでエレベータ、ラダーも交換。エレベータ/ラダーはそのまま交換できるが、サーボ自体少し高さがあるのでエルロンは主翼の穴を深く削って押し込んだ。 実際に動かしてみると、明らかに止まり方が違う。 例えばニュートラル位置に戻る場合、前の6gサーボではゆっくり停止し、おまけに停止位置が毎回微妙に違うが、デジタルサーボではビシッと同じ位置に停止し、停止位置でも常に制御が行われている。 トルクは倍近くあるので安心感がある。 問題点もある。ラダーサーボがニュートラル位置で、何かのタイミングでバタバタとハンチングを起こす場合がある。他の動翼では起きない現象であり、ラダーの面積、質量、リンケージの剛性に起因する共振周波数とサーボの制御周波数が共振しているような感じがする。実際に飛ばして問題が有ればリンケージ回りを見直す必要がある。 しばらく動翼をバタバタ動かした後でアンプに触ってみるとかなり熱をもっていた。消費電力が高いので仕方ない。 ・・・で、S−BECを取り付けた。値段が値段なのでノイズが心配であったが、部屋の中で動かした限りでは問題ないようだ。 S−BEC自体は変換効率が高いので殆ど熱をもっていなかった。あとは飛ばしてみるだけ。(2007年9月13日)    |
| 飛ばしてみて 実際に飛ばしてみると全て問題なし。 まず気になっていたS−BECのノイズであるが、かなり遠くを飛ばしてみたが変な挙動も発生せず、ノイズの問題は全くなかった。 デジタルサーボについては、サーボ交換により舵の利きが非常に良くなった。エクスポ(EXP)量を変えたような感じで、上空では特にエレベータを今ままでの感覚で舵を打つと真っ直ぐ飛ばない。スティックを丁寧に操作する必要がある。 ホバリング/トルクロールは大舵を打たなくてもリカバリができるので非常にやりやすくなった。 結果的に舵を打つ量が減るので(無駄な舵が不要になるので)、機体が素直に飛んでくれるという印象。 本日4回飛ばしたが、どこにも異常なし。 耐久性は未知数だが、動翼をバタバタと動かすファンフライ機で暫く飛ばして問題なければ、バルサ機にも導入してみようと考えている。(2007年9月15日) |
| アンプの発熱 S−BECに交換してアンプの発熱が低減。 これまでは飛行後にアンプを触るとかなり熱くなっていた(触れる程度ではあるが)。ところがS−BECの導入後は殆ど発熱がない。この機体ではアンプは露出してペラの風を直接受ける位置にあるので冷却の問題はないが、アンプを胴体内に配置する場合は効果大。(2007年9月25日) |
 エアクラフトから高Kv値のモータHP-P1913-06が発売。このモータを使った機体の動画を見てびっくり。これは買わねば・・・。 エアクラフトから高Kv値のモータHP-P1913-06が発売。このモータを使った機体の動画を見てびっくり。これは買わねば・・・。ということで例題機になっているWindrider Mini Beeをスカイタウンから入手。90cm×45cm×8cmの箱の中にEPP発泡成形の機体が入っていた。実際には箱の中に新聞紙がゴミ袋2袋分詰まっており都会のゴミ事情を考慮して予め処分したとのこと(笑)。感謝です。 しかし、箱に貼り付けられているシールのデザインは軽薄。おもちゃのイメージを脱していないところがナイス。 (2006年9月4日) |
| <製作> エアクラフトの説明によると2時間位で完成するとのことだが、とてもそんな短時間に完成するものではなかった。実物を見てみるといくつかの問題点が明らかになった。 まず「飛行中の翼の撓みの低減」。これは翼の裏面全幅にわたって1.6mmのカーボンロッドを埋め込んだ。補強後は明らかに撓み難くなった。 次に「アウトランナーのモータの固定方法」。これはハイペリオンのスティックモータマウント(ベニヤ製)を使用。強度が心配なのでカーボンロービングでカチカチに補強を施した。スティックの差込部に合うようにEPPを切り取りスーパーX2で固定。ピッチング方向の強度が不安だったのでカーボンロッドを前後に掛け渡した。 ・・・と言うような小改造を行っているとあっという間に時間が過ぎます。    |
| 付属のリンケージはいつもの焼きの入っていない代物。微調整もできないのでカーボンロッド+ロッドエンドで自作。リンケージの遊びは皆無。 アンテナはGWS6chを1mに延長し、先端の20cmを翼の中央から垂れ下げた。以前、同様の形状のクリックを作った際にアンテナの先端を垂らすことでかなりの感度向上を確認できたので、この経験を生かすことに。    |
| (完成) 仕様 モータ:HP-P1913-06 アンプ:HP20A 受信機GWS6ch サーボ:WP06BB 電池:PQ800の3セル メカ搭載部は限られており、受信機とアンプを離すためにもアンプは外付け。 この状態ではかなりの後ろ重心になる。機首にバラスト10gを入れると、重心は先端から18cm、+10gで17cmになる。重心のメーカ推奨値は6.25インチ=約16cm、E−ZOENでは+1.5cm後方との情報があった。 全備重量:315g(バラストなし)    |
| (飛行) 初飛行はPQ800を使用。これは性能劣化が進んでおりフルスロットルで7A、12000rpmしか回らないが初飛行で機体を壊すのもいやなので超ソフトな設定で飛ばすことにした。(本当は前日に首を寝違いし、、高速飛行に耐える自信がなかったからです。腹が立つやら情けないやら・・・) 重心は18cm(バラスト10g)で試してみた。明らかに後ろ重心で手投げ後に超不安定であったがモータONで無理やり上空へ。機速が乗ると安定してくるが頭上げの傾向が強くダウンとリムで修正。電池の性能が低いので高速飛行はできないがロール/ループは問題なし。舵角のメーカ推奨値(上側1/2インチ、下側1/4インチ)ではロールレートが遅く舵角を大きくする必要がある。上空でパワーオフすると意外と良く浮くことを発見。抵抗が少ないからだろうか。5分ほど飛ばして着陸。当然寸前でバランスを崩して墜落。EPP製なので無傷であることは言うまでもない。 ここで雨が降ってきたので撤収。 帰宅後サンダーパワー730mAh、HP800mAhで試験。家の中で17000rpmまでは確認したがそれ以上は怖くて回せなかった。メーカ発表データは約20000rpm、ピッチ速度140kmだそうだ。 (結果) ・重心位置はバラスト10gを追加して17cmにすれば素直に飛ぶはず。 ・アンテナを垂らしたお陰かGWS受信機でもノイズを拾うことはなかった。 ・視認性は問題。太陽の方向に行くと真っ黒くなってしまい表裏が分かり難くなる。形状での機体の判別が難しい無尾翼機の宿命だろうが、何とかなないものか・・・。 この手の機体は評価が難しいが、常に手元に置いておき好きなときに飛ばしてストレス解消・・・みたいな使い方をするのであれば文句なし。(2006年9月9日) |
| (本飛行) 重心位置を前端から17cmに調整、バッテリHP800mAh3セルを使用して再挑戦。助手の手を借りずに自分で投げてみることにした。 少し助走して投げて直ぐにモータON、綺麗に上昇。トリムを合わせてフルスロットルにすると、プッシャー機特有の共鳴音を残してあのビデオで見た通りの高速でカッとんでいく。エレベータ方向が敏感であるがフルハイで頭上げすることないのでオンザレールの感覚。これは面白い。 エルロン/エレベータ共にD/R70%に設定して2度目の飛行。高速ローパスは迫力あり。重心位置もバッチリ。完成!(2006年9月24日) |