�d�o�o�@
![]()
���SD�A�N���@��
�i���̂Q�j
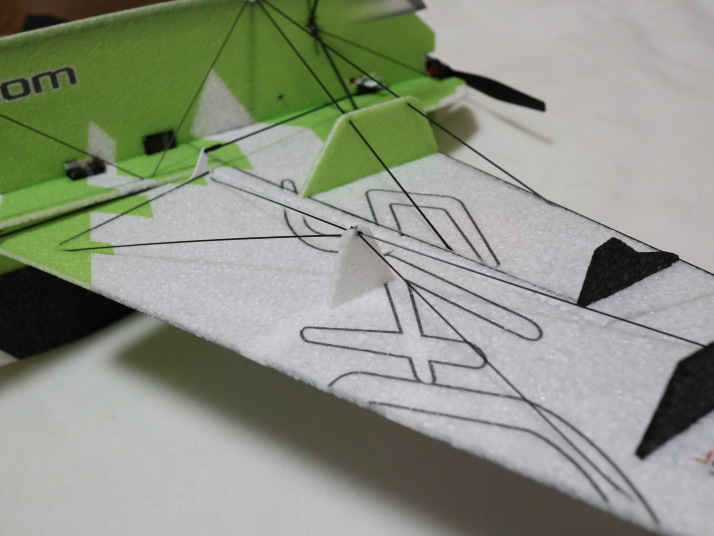
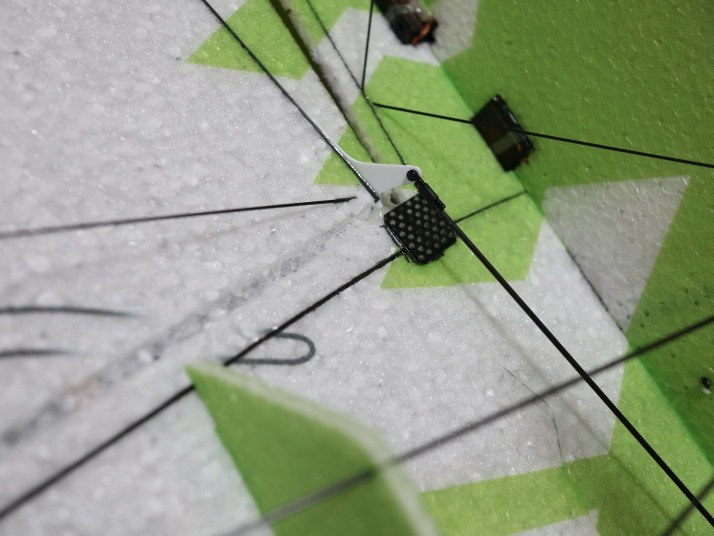
| �V�K���� ����܂Ŕ���Ă����̂́ARC-Factory Extra Slick BACKYARD�@�d�r�Ȃ��łP�V�O�����x�A����A���Ƀq���W����Ă��܂����̂Ŕp���B �V�K�ɓ�������̂��ARC-Factory Edge 540 V3 SuperLITE�@�ł���B �S�����̂d�o�o���J�[�{�����b�h�Ȃǂłӂ�ɕ⋭����\���B�g�ݗ��Ă͎ʐ^�t���̐������ʂ�ɍs���n�j�B�G���x�[�^�y�у��_�[�̃����P�[�W�͕ύX�B�P�D�W�����̃J�[�{�����b�h�Œu���������B �ڒ��܂͒�S�x�A���S�x�̏u�ԁi�d���ܑO��j�ƁA�X�[�p�[�w���g�������B�g�݂�����ƍ����͊m�ۂł��Ă��邪�A�ė�����Ƃǂ��Ȃ邩�H�B �d�ʂ͓d�r�Ȃ��łP�S�O���A�O������R�O���y���B�t����Ԃł̕����͊i�i�Ɍ��シ��͂��B ��NJp�ƃ��[�^�t�]�łǂ��Ȃ邩�y���݁B�i�Q�O�Q�R�N�X���Q�S���j
|
|||||
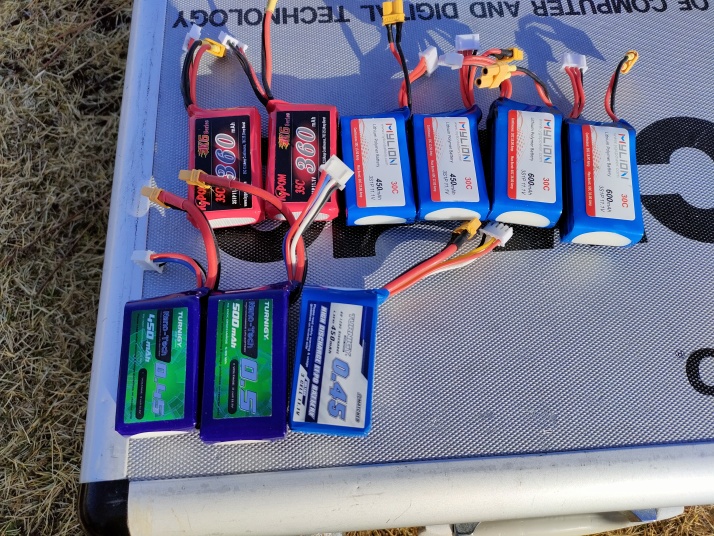
| ��������Ă݂��B ���̎ア���ŏ���s�ł����B�܂��͑f���̗ǂ��Ƀr�b�N���B�i�C�t�G�b�W�ł̔��̎����e�Ղɂł���B�ė������Ȃ��@�̂̕ό`���Ȃ�����Ǝv����B �d�r���݂ł��P�W�O����A�������������̂ŗǂ������ǂ��~�܂�@�́B �̐S�̋t����s�́A�y�ʉ��̌��ʐ��A�z�o�����O���̃X�e�B�b�N�̈ʒu������܂łƂ͈قȂ�]�T������o�b�N�㏸���e�ՁB�t����Ԃŋ@�̂��\��Ȃ��悤�ɂ���܂ňȏ�ɑ@�ׂɃp���[���R���g���[������K�v������B���ꂪ��肭�����Ƌt����Ԃ̎��Ԃ������Ȃ�A�����ł̋t���z�o�����O���\�ɂȂ�B �d�r�̏���ʂ����Ȃ��Ȃ��Ă���̂ɂ��������B��s���Ԃ͊��o�I�ɂ͂P�D�T�{�B���ł̃y���̉����Â��Ȃ��Ƃ�������M����B �����ɂQ�Z��300���`���������Ă݂��B���Ȃ���Ԃ��A�t���z�o�����O�ł͕������x�̃p���[�B��͂�R�Z�����K�v�B ���|�d�r�́A������Q�Z��300���`���^�R�Z��360���`���^450���`���^600���`���A�d���́A17/37/38/50�O�����B �R�Z��450���`�����d�ʁA��s���Ԃ̊W�ŗD��Ă���̂ŁA�����lj����邱�Ƃɂ����B �O�̂��߂ɁA�t����s���n�߂�̂ł��ꂪ�܂���Extra Slick BACKYARD�̂悤�Ȍ����d�o�o�@�������߁B�{�@Edge 540 V3 SuperLITE�œ�����ė�����Ɣ�Q�͐r��B�i�Q�O�Q�R�N�X���R�O���j
|
|||||
| �o�����I �t���z�o�����O����̃��[�����Ȃ���o�b�N�㏸���ł���悤�ɂȂ����B�������p���ŋt���z�o�����O�����A�G�����������ɐ��ăX���b�g�����n�C�ɂ���ƍ����Ń��[�����Ȃ���o�b�N�㏸����B�C�O�̓���ŃC���h�A�Ō��鉉�Z�B ��x�ł���ƈӊO�ɍČ����̂��鉉�Z�A�{���͋����킹��M������ɔ�I�B �G�������̑NJp���傫���������A�Ō�̓G�������̃z�[���t�߂��j���B�J�[�{���V�[�g�ŏC�����Ď���ɔ������B�i�Q�O�Q�R�N�P�O���V���j
|
|||||
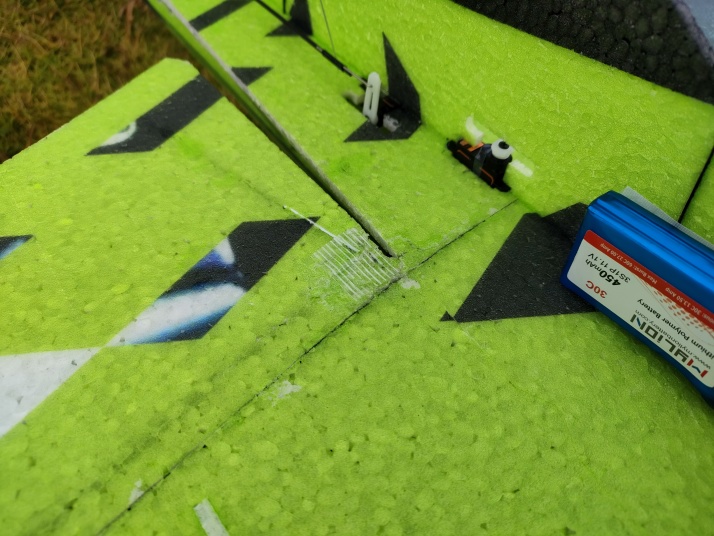
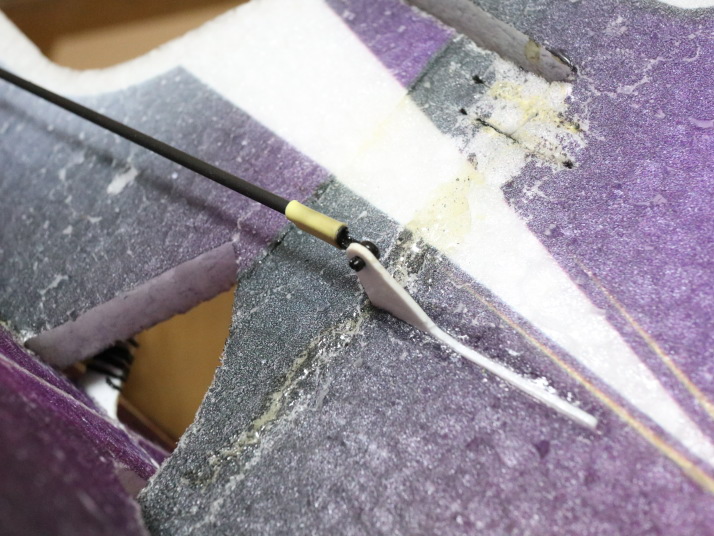
| �t�����[�� ���q�ɏ���ċt������̃o�b�N���[�����Ă���ƈى������B�~�낵�Ă݂�ƃG�������̃q���W���j���B �t�����[�����ɂ͕��ʂƂ͈Ⴄ�d��������̂Ŏd���Ȃ��Ƃ���B�O���X�e�[�v�ŕ⋭�A�{���̓��[�����x��}�������K�����Ė��Ȃ������B���A�w�ʃR�u���Ń��_�[�����ɓ�����A���_�[�̔������������Ă��܂����B����Œ������Ƃ͂ł������A���̂����肪�����@�̎�_�B ���̋@�̂̎����͒Z���C������B�i�Q�O�Q�R�N�P�O���Q�X���j
|
�i���̂P�j
| ���[�^�t��] �P�T�N�ʑO�̘b�AVPP�i�t�s�b�`�y���j���g���ċt����s�ɔM�������B�u�o�o���j�b�g�̊����x��o�b�e���\�̖͂��Ŏv���悤�ɐ��͂��҂������̂����Ɏ~�߂Ă��܂����B���̌�A�C�O�Ȃǂłe�R�o�̋@�̂łu�o�o�t�������s�����l�q�B���݂͂ǂ��Ȃ��Ă���̂��H ��N�����痃���W�O�O�����łQ�O�O���ʂ̋@�̂Ńt�@���t���C���y���ނ悤�ɂȂ����B�������K�����̂Œė����邱�Ƃ��F���BRC-Factory Extra Slick BACKYARD����n�܂�A���ߌ���MXS-C BACKYARD�����݂̎�́B ���N�ɓ���A���[�^�t�]�ɂ��SD�t���C�g�̃A���v���o��BT-MOTOR AM16A �Ƃ����A���v�A����Ƀ��[�^�Ɛ�p�y����g�ݍ��킹���Z�b�g���̔�����Ă���B Extra Slick BACKYARD�͔���@��������̂ł��̋@�̂łS�c�t���C�g�������Ă݂邱�Ƃɂ����B ���j�b�g�͂��ꂢ�Ȕ��Ɏ��e����V�[���܂œ����Ă���B
|
|||||
| �A���v���ځ^�ݒ� �ȒP�ɂS�c�t���C�g�����邽�߂ɁA�A���v�݂̂������B�R�l�N�^�����t���Ĕz�����ē��ڊ����B�A���v�̐ݒ�͈ȉ��̔��Y�^�Ɋ�Â��čs�����B���Ȃ��ݒ芮���B ���ۂ̔�s�ł́A����]�i�݂̂́j���[�h�Ɛ��t��]���[�h�̂Q�̃��[�h���g���\��B���ɁA�ė����Ȃǂɑ����ɃX���b�g����S�ɂ��ă��[�^��]���~�����邽�߂ɐ���]���[�h������Ă����̂��ǂ��Ǝv����B ���X�A�NJp�ύX���߂ɂR�̃t���C�g���[�h��ݒ肵�ĕK�v�ɉ����Đ�ւ��Ȃ������Ă����B����̓t���C�g���[�h�P�Ń��[�^���t��]���Ȃ��悤�ɃX���b�g���J�[�u��ύX�B���̑��̃��[�h�ł͐��t��]�\�Ƃ����B ��p�̃y���͂f�v�r�̃y�����͋��x�����肻�������A�ė�����x�Ƀy�����܂��̂͌�ƁB�]���āA�y���̓S���~�߂Ƃ����B�O�̂��߂ɗ\���̃y�����T�{�p�ӂ����B �����̒��Ńy�����Ă݂��B���t�]�̐�ւ��͈ӊO�ɃX���[�Y�B��������ւ����̃A���v�ւ̕��ׂ͑傫���͂��Ȃ̂Œ��J�ȑ��삪�K�v�Ǝv����B�t��]���ɂ��\���Ȑ��͂�����̂ʼn��O�ł̔�s�Ɏx��͂Ȃ��͂��B �σs�b�`�Ƃ͈���ĒP�Ƀ��[�^�̉�]������ς��邾���Ȃ̂Ŕ��ɃV���v���Ōy�ʁB�i�Q�O�Q�Q�N�P�Q���R�P���j
|
|||||
| ���Y�^ �������̐ݒ� �A���v�ɃX���b�g���̍ő�l�ƒ����t�߂ƁA�ŏ��l���o��������B 1.�v���|�̃X���b�g���X�e�B�b�N���ŏ�ʒu�ɂ���B 2.��M�@�Ƀo�b�e����ڑ��B 3.�r�[�v�[������B�@�����f�B����I�������A 4.�X�e�B�b�N���ʼn��ʒu�ɂ���B 5.���[�^�[�N���̃s�[�v�[������ΐݒ芮���A�o�b�e������U�O���ēx�o�b�e����ڑ��B �ʏ��s�\ ��4D�d�l�ɂ���@�@ 1.�o�b�e���[��ڑ�������Ԃ���ESC�{�̂̃o�b�e�����}�C�i�X�R�[�h(��)�̍����ɏ����ȋ��F�̃{�^���ɃA�N�Z�X�B 2.�{�^����10�b�ԉ����ƃs�����b�s�ƂȂ�A�X���b�g���𒆉��t�߂ɂ���ƃs�[�Ɩ�4D���[�h�ɂȂ�B 3.�o�b�e�����O���A�ēx�ڑ��B 4.�X���b�g���ŏ��l�Ńo�b�e����ڑ����Ă����[�^�[�͉�]���Ȃ��B�X���b�g�������ʒu�ɂ���ƃ��[�^�[�N���B ����A��s���[�h�͋t��]�Ȃ����R�c���[�h�A���t��]���S�c���[�h�ƌĂԂ��Ƃɂ���B |
|||||
| ��s ����Ă݂��B�d�r�́A�S�c���[�h�ŃX���b�g���ŏ��ɂ��Đڑ��B���̌�A���X���[�ɂ���Ɖ�]�\�ɂȂ�B ���͕͂��ʂ̃y���������̂͊m�������A���ʂɔ���̂ł���Ή�����Ȃ����x���B ���~�������ċt��]�ɂ���Ƌ@�̂���~���A�o�b�N�ŏ㏸����B�ӊO�Ɉ��肵�Ă���A�X���b�g���J�ɑ��삷��Α̐�������邱�ƂȂ��z�o�����O���ł���B���̍ۂ̑ǂ̑ł�����������Ȃ��̂Œ����Ԃ̃z�o�����O�͂ł��Ȃ������B�G���������������Ɉ��肷��͂��B �i�C�t�G�b�W��Ԃŋt��]������Əu�Ԃɔ��]�A����͖ʔ����B �{���͂R��ڂ̔�s���ɒ��őǂ�ł��ԈႦ�ē����璅�n���ă��[�^�E���ŏI���B ���̒ė��Ň@�v���y���Z�[�o�͋@�\����A�y���͂f�v�r�̂悤�ɊȒP�ɐ܂�Ȃ��B�������ă��[�^�����b�N����ƃ��[�^��~�B�ēx�d�r��ڑ�����ƒʏ�ʂ�쓮����A���Ƃ����������B �܂��A���[�^�̐��]�̋t�]�̐�ւ����q���ɂȂ�Ȃ��悤�Ƀq�X�e���X���̐ݒ���l�������A���ۂɂ̓A���v���ɂ��̋@�\������悤�ŁA�X���b�g���J�[�u�͒����Ŗ��Ȃ����Ƃ����������B ���̃A���v�y�уy���͎��p�ɑς�����̂ł���B�ȑO�̉σs�b�`�V�X�e���̂悤�ɒė��A���j���ƂȂ炸�A�A���v�^���|�d�r�̔��M�̖����Ȃ��B���Ƃ͑��c�Z�p�̖��B�ǂ�Ȕ����������Ηǂ��̂����l�̑��c����������K�v����BYouTube�̏o�ԁB ���^�@�p�̂Q�|�R�Z���̂T�O�O��Ah���x�̃��|���������̂ŁA�o�����X�R�l�N�^�����ŏ[�d�ł���[�d����B�fForce�̂f�R�e�t�n�A���삪�ȒP�ŕ֗��B�i�Q�O�Q�R�N�P���R���j
|
|||||
| ���K�� �{���X�t���C�g�i���v�P�V�t���C�g�j�A�F�X�ƕ������Ă����B YouTube�Ŕ���������Ă݂�Ƒ傫����ʂ���Ƈ@�t���z�o�����O�i�t���g���N���[���j�A������s����t�����ւ̔��]�B�t���b�g�X�s���C���g���m�[���i�w���̂悤�ȁj�Ǝv����B�܂��͋t���z�o�����O����K�B ��{�I�ɐ�����������y�����t��]������Ƌ@�͕̂K�����������B�t���z�o�����O�ɓ���邽�߂ɂ́A���ŋt��]�����ċ@�̂��t���ɂ��āA�X���b�g�������č��x�����X�ɗ��Ƃ��悤�ɂ���B���x�����X�ɗ��Ƃ��̂��~�\�ŁA�X���b�g����������̂��L���ŁA�p��������Ȃ������ꍇ�͎����I�ɋt���z�o�����O�ɓ���i�G����������Ȃ��Łj�B ���̏�ԂŒn�ʋ߂��܂ō~�낷���Ƃ��ł���B�n�ʋ߂��ŃX���b�g���ő�ɂ���ƁA�t���Ńo�b�N�㏸�A���̌�A�p��������Đ����ɂȂ�Ɠ����Ƀt���b�g�X�s���ɓ���B�����Ń��[�^�𐳉�]�����ă��J�o���A���[�^�̉�]�����̐�ւ��͉��������ǂ��̂Ń��J�o�����x��Ēė��Ƃ͂Ȃ�Ȃ��B �t���ł̃o�b�N�㏸�͓d�r�̎c�ʂ��Q�O������Ώ\���\�A�d�r�̗�����邽�߂ɔ�s��Ɏc�ʂ��`�F�b�N���Ĕ�s���Ԃ̖ڈ���悤�ɂ��Ă���B �P��̔�s���Ԃ��S���ȏ�Ƃ������ꍇ�͗e��600���`���̃��|�d�r���ǂ��B ���Z�̈��萫�̓t���C�g�ɔ�Ⴗ��̂łP�O�O�������ΐl�O�Ŕ����悤�ɂȂ邩���B�i�Q�O�Q�R�N�P���X���j ���ė����̉ߕ��ׂɂ�郂�[�^�̃��b�N��Ԃ���̕��A�́A�X���b�g�������ƍs�����Ƃ��ł���i�d�r���Đڑ�����K�v�͂Ȃ��j�B
|
|||||
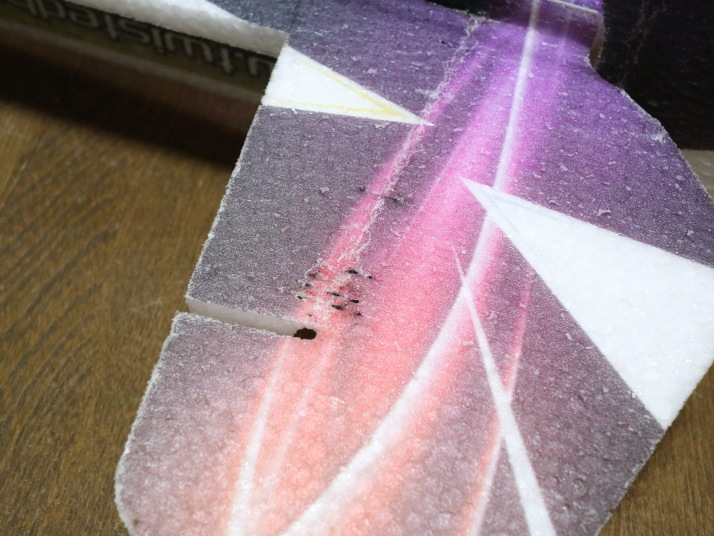
| ���g�n�w ���Ԃɓ�����B���Ă�������B�Đ����Ă݂�Ƌt������̃o�b�N���̋����ɖ@���������邱�Ƃ��������Ă����B����܂ł̔�s�͂S�O��A����Ă����̂ŒႢ�Ƃ��납��t���ɂ��邱�Ƃ��ł���悤�ɂȂ����B���x���Ⴂ�Ƌ@�̂̋����̔c�����e�ՂȂ̂ŏ�B�������悤�Ɏv���B �ė����͂�����������ڒn����悤�ɂ��Ă���B��������ڒn�������Ɏ�r���O�ꂽ�B���̓x�̏C�����ʓ|�Ȃ̂ŁA��r�Ȃ��Ƃ����B�������̓n���h�L���b�`����̂œ��ɖ��Ȃ��B����łP�Q���̌y�ʉ��B �y���̓����菊�����������̂����ɐ܂�Ă��܂����B����ł�����ȊO�̑����͂Ȃ��B���\�A�@�̂̓{���{���������ƂP�O�O��͔��ł��炤�\��B�i�Q�O�Q�R�N�P���Q�Q���j
|
|||||
| ��B�H �{���܂łō��v�T�T��̃t���C�g�A�t�����ɃX���b�g�����ׂ��������ł���悤�ɂȂ�A�@�̂̈��萫�������Ȃ��Ă����B���d�˂�Ƌ��R�A�ʔ��������ɏo���킷���Ƃ�����B�Č����������Ȃ�P�̋Z�Ƃ��邱�Ƃ��ł��邪�����_�ł͂܂��܂��B ���|�d�r�̂��߂ɔ�s���Ԃ̊Ǘ��͂��Ă�����肾���A�M�����邠�܂�A��s���ɋ}�Ƀp���[�_�E���c�ʂO���ƂȂ����B�C��t���Ȃ��ƁB �{���͂܂��y�����P�{�܂�Ă��܂����B����łQ�{�ځB�c��T�{�A�K�X��[���K�v�B �t����s���肵�Ă���ƁA�p�������ɂ߂悤�Ƃ��ē��̎��͂��b������悤�ȋC������B�v���Ԃ�ɂU�O�����̋@�̂����Ă݂�ƁA�p���̌��ɂ߂��ȑO�����ł���C������̂ŕs�v�c�B�i�Q�O�Q�R�N�Q���P�Q���j
|
|||||
| �V�����@�� ����܂łP�O�O��߂�������B�c�O�Ȃ���̌n�I�ōČ��\�ȋZ�̏K���͂ł��Ă��Ȃ��B�������t���Ŗڂ̑O�܂ō~�낵�Ă��邱�Ƃ͂ł���B����Ȃ��Ƃ����Ă���ƒn�ʂɐڒn�������ɓ����菊�������ƃ��[�^�}�E���g���ǒE���Ƃ������ƂɂȂ�B�C���̓x�ɏd���Ȃ邵�E�E�E�B �{�@�͏���s����1�N���A��s�͑����A�C�������Ȃ�̉ɋy�ԁB�G���x�[�^�̃q���W�͊��ɐ�Ă��莅�ŕ�C�A�G�����������E�B �ӊO�ɑϋv�����������̂������P�[�W�p�̃X�i�b�v���̎��t���s���B�ˑR�Ƃ��Č��݁B ����Ȃ��Ƃœ����@�̂��ēx�w���B�Ȃ��������Ă���̂ƁA���������₩�ŗ��K�ɓK���Ă���̂����R�B �G���x�[�^�A���_�[�̃T�[�{��5.5���̃��^���M�����g�p�i���p�@���r���Ō����j�B�n���`���O�����y�ёϋv������ɕK�{�B�i�Q�O�Q�R�N�R���P�Q���j
|